丂
倃倄僗僥乕僕惂屼婎斅偺摦嶌妋擣曽朄丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽侽俀丏侽係丏侾俇丂丂倴倕倗倎
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
俀侽侽俀丏侽係丏俀俀
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
俀侽侽俁丏侽俆丏俀俀
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
俀侽侽俆丏侽俉丏俀係
丂丂儅僀僐儞偲偺捠怣僥僗僩傪偟偰丄儌乕僞乕傪夞偡傑偱愢柧偟傑偡丅
丂丂
侾丏丂儅僀僐儞偲偺愙懕僥僗僩
丂乮侾乯丂弨旛
 應掕僜僼僩乮俻俠俙俵俥俿乯偲儅僀僐儞偲捠怣偝偣偰摦嶌妋擣傪偟傑偡丅
應掕僜僼僩乮俻俠俙俵俥俿乯偲儅僀僐儞偲捠怣偝偣偰摦嶌妋擣傪偟傑偡丅
俿俙俈俀俆俈俹偺儌乕僞乕僪儔僀僽抜乮嘐斣僺儞乯偼丄揹尮偺愙懕傪偟傑偣傫丅
僷僜僐儞偲惂屼婎斅傪働乕僽儖偱愙懕偟傑偡丅
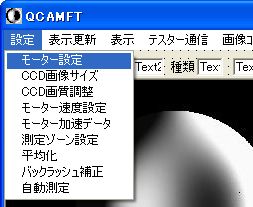
應掕僜僼僩傪婲摦偟儊僯儏乕偺丂愝掕丂[儌乕僞乕愝掕乿
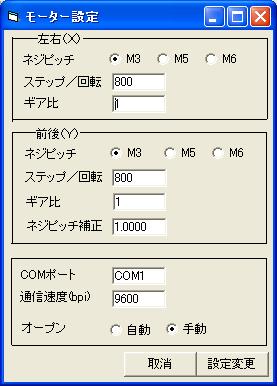
憲傝僱僕偺僺僢僠傪慖傃丄
僗僥僢僾乛夞揮丂傪愝掕丄
僊傾斾傪愝掕偟丄
俠俷俵億乕僩丂傪愝掕偟丄
捠怣懍搙傪俋俇侽侽俛俹俬偵愝掕偟丄
僆乕僾儞庤摦偺愝掕偵偟傑偡丅
愝掕曄峏傪僋儕僢僋偟堦扷廔椆偟傑偡丅
丂丂
丂
丂
丂
丂
丂
丂
乮俀乯 丂捠怣僥僗僩
丂乮儌乕僞乕偼夞偝偢丄儅僀僐儞偲偺捠怣偺僥僗僩傪峴偄傑偡乯
丂丂 丂俻俠俙俵俥俿傪婲摦偟丄丂儊僯儏乕偺 [昞帵]丂[撪晹僨乕僞昞帵]
僋儕僢僋偟傑偡丅
丂丂丂暿偺Window偑弌傑偡偑丄偙傟偼捠怣偺忬懺傪昞帵偡傞傕偺偱丂弶婜忬懺偼丄偙偆側傝傑偡丅丂乮嘆弶婜忬懺乯丅
丂丂丂惂屼婎斅偺揹尮傪俷俶偵偟丄丂儊僯儏乕偺丂丂[僥僗僞乕捠怣]丂丂
[俠俷俵僆乕僾儞]傪僋儕僢僋偟傑偡丅
丂丂丂僆乕僾儞屻偵儅僀僐儞偵僥僗僩梡偺僐儅儞僪偑憲傜傟乮俠侽俠侽俠侽乯丄僄僐乕偑曉偭偰偔傞偼偢偱偡(嘇僆乕僾儞屻乯丅
丂丂丂曉傜側偄応崌偼丄懍傗偐偵惂屼婎斅偺揹尮傪俷俥俥偵偟偰働乕僽儖傪敳偒傑偡丅
丂丂丂僄僐乕偑惓偟偄応崌偼丄倃倄僗僥乕僕堏摦偺憖嶌傪偟偰傒傑偟傚偆丅堏摦嫍棧偑抁偄応崌偼丆傎偲傫偳弖帪僄僐乕偑
丂丂丂曉偭偰偒傑偡丅嫍棧偑侾倣倣偺応崌偼丄彮偟抶傟偰僄僐乕偑曉傝傑偡丅乮嘊僗僥乕僕堏摦乯堏摦僐儅儞僪偺倃枖偼倄偼丄
丂丂丂夞揮偑廔椆偟偰偐傜僄僐乕偑曉傞偨傔彮偟抶傟傞栿偱偡丅侾倣倣偺堏摦傪楢懕偟偰乮偡偽傗偔俆乣俇夞僋儕僢僋乯傒傑偟傚偆丅
丂丂丂抶傟偰夞悢暘偺僄僐乕偑曉傟偽俷俲偱偡丅
丂丂丂惂屼婎斅偺揹尮傪愗傝傑偡丅
丂丂丂忋庤偔倃倄僗僥乕僕偲捠怣偱偒側偄応崌丄壓婰偺儊僢僙乕僕偑昞帵偝傟傞応崌偑偁傝傑偡丅丂丂丂丂
| 俶倧 | 丂丂丂儊僢僙乕僕 | 丂敪惗偡傞応崌丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 | 丂丂懳丂張丂曽丂朄丂 |
| 嘆 | 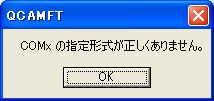 乮拲乯丂倁倕倰俀丏俉俵俆 埲崀 |
丂俠俷俵億乕僩偑巜掕偝傟偰偄側偄偐 丂俠俷俵倶丂偺宍幃偵側偭偰偄側偄丅丂 丂 |
丂 儌乕僞乕愝掕偱丄俠俷俵億乕僩偺愝掕傪偡傞丅 俠俷俵侾丄俠俷俵俀丂偺宍幃偵偡傞丅
|
| 嘇 |  |
僷僜僐儞偱擣幆偟偰偄側偄俠俷俵 丂億乕僩斣崋傪巜掕偟僆乕僾儞憖嶌偟偨 丂乮嵍椺偼丄巊梡偱偒側偄俠俷俵俁傪 丂丂巜掕偟偨応崌乯 |
丒僐儞僩儘乕儖僷僱儖偱巊梡壜擻側俠俷俵億乕僩傪巜掕偡傞丅丂 丂丒倀俽俛僔儕傾儖働乕僽儖傪巊梡偟偰偄傞応崌偼丄 丂丂僨僶僀僗僪儔僀僶乕丂偺忬懺傪挷傋傞丅 丂丒俠俷俵倶偺巜掕曽朄乮曄峏曽朄乯偼丄QCAMFT丂儊僯儏乕 丂丂偺丂丂愝掕丂->丂儌乕僞乕愝掕丂 |
| 嘊 | 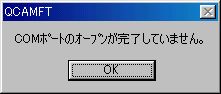 |
丂俠俷俵億乕僩傪僆乕僾儞憖嶌偣偢偵 丂倃倄僗僥乕僕堏摦摍偺憖嶌傪偟偨丅 |
丂丒僆乕僾儞偺憖嶌傪偡傞丅儊僯儏乕偺丂 丂丂僥僗僞乕捠怣丂->丂俠俷俵億乕僩僆乕僾儞 丂丒枖偼帺摦僆乕僾儞偺巜掕偟婲摦偡傞丅 |
| 嘋 |  |
丂倃倄僗僥乕僕偺儅僀僐儞偐傜偺庴怣偱 丂僞僀儉傾僂僩偑敪惗丂乮倃倄僗僥乕僕偺 丂儅僀僐儞偐傜曉帠偑柍偄丅乯 丂[峫偊傜傟傞帠] 丂丒儅僀僐儞偑摦嶌偟偰偄側偄 丂丂乮惂屼婎斅偺揹尮偑俷俥俥丄 丂丂丂丂婎斅偺屘忈乯 丂丒惂屼婎斅偲僷僜僐儞傪働乕僽儖 丂丂偱愙懕偟偰偄側偄 丂 |
丂丒嵍婰傪僠僃僢僋偡傞丅 丂丒應掕帪偵敪惗偟偨応崌偼偦偺應掕傪拞巭偟丄應掕傪 丂丂傗傝捈丂偟偰壓偝偄丅 乮拲乯 憲怣偼丄侾暥帤憲傝丄曉帠傪懸偮傛偆偵偟偰偄傞丅 僞僀儉傾僂僩偑敪惗偡傞偲偦偺僐儅儞僪慡懱偺憲庴怣傪 掹傔傞丅 椺偊偽丂嵟弶偺僆乕僾儞憖嶌偱丄乭C0C0C0乭傪憲傞偑 嵟弶偺乭俠乭偱僞僀儉傾僂僩偑敪惗偟偨応崌丄屻偺俆僶僀僩偺 憲怣傪掹傔傞丅偙偺応崌乽庴怣僞僀儉傾僂僩敪惗乿偺儊僢僙乕 僕偼丄1夞偺傒昞帵偝傟傞丅 |
| 嘍 |  |
俠俷俵億乕僩偺僆乕僾儞偑嵪傫偱偄 傞偺偵丄嵞搙僆乕僾儞憖嶌傪偟偨丅 |
丂 |
| 丂 | 丂 | 丂 | 丂 |
丂丂丂丂丂丂丂丂丂丂丂
乮拲乯丂倁倕倰丂俀丏俉俴俵埲崀偱偡丅丂偦傟埲慜偺倁倕倰偼丄俀偮栚埲崀偺僄儔乕儊僢僙乕僕偺撪梕偑揔愗偱側偄応崌偑偁傝傑偡丅
丂丂儅僀僐儞偐傜僄儔乕僐乕僪偑曉傞応崌偑偁傝傑偡丅僄儔乕偺堄枴偼丄愢柧彂乮儌乕僞乕僪儔僀僶巇條乯偵彂偄偰偁傝傑偡丅
丂丂
 丂丂丂
丂丂丂
丂丂丂[僄僐乕乮曉帠乯偑曉傜側偄応崌偵峫偊傜傟傞偙偲]
丂丂丂丂丒
俠俷俵億乕僩偺斣崋偑娫堘偭偰偄傞丅
丂丂丂丂丒 働乕僽儖偑愙懕偝傟偰偄側偄丅
丂丂丂丂丒
僗僩儗乕僩働乕僽儖偲僋儘僗働乕僽儖傪娫堘偊偰偄傞
丂丂丂丂丒帺嶌偺愙懕働乕僽儖偱丄俈丆俉偺傪僐僱僋僞偱寢慄偡傞応崌丄僷僜僐儞懁偵側偭偰偄側偄丅
丂丂丂丂丒俙俢俵俀俁俀俙偑摦偄偰偄側偄丅乮岆攝慄側偳乯
丂丂丂丂丒俙俢俵俀俁俀俙偲儅僀僐儞偺岆攝慄
丂丂丂丂丒儅僀僐儞偑摦偄偰偄側偄丅乮僙儔儘僢僋偺岆攝慄乯
丂丂丂丂丂儅僀僐儞偑摦偄偰偄傞応崌偼丄揹尮俷俶偱儌乕僞乕偑弶婜忬懺偵側傞偺偱丄儌乕僞乕偺揹尮偑嫙媼偝傟偰偄傞応崌堦弖寉偔壒
丂丂丂丂丂偑弌傑偡乮乽僋乿偲偄偆壒乯丅丂偙傟偼丄僷僜僐儞偲捠怣偑偱偒偰偄側偔偰傕儅僀僐儞偝偊摦偄偰偄傟偽傕偙偺壒偑偱傑偡丅
丂丂丂丂丂儅僀僐儞偑摦嶌偟偰偄傟偽丄俙俿俋侽俽俀俁侾俁偺俹俛俈偲俹俛俁偼丄揹尮俷俶帪偵堦弖俫儗儀儖偵側傝傑偡丅俀侽ms掱搙偺帪娫偱偡丅
丂丂丂丂丂俴俤俢亄掞峈傪愙懕偡傟偽丄堦弖岝傞偐傕偟傟傑偣傫丅偙傟偑妋擣偱偒傟偽屻偼丄捠怣晹暘偺攝慄傪廳揰揑偵尒側偍偣偽夝寛
丂丂丂丂丂偡傞偲巚偄傑偡丅
丂丂丂丂丒儅僀僐儞偵僾儘僌儔儉乮媦傃俤俤俹俼俷俵僨乕僞乯偑彂偒偙傑傟偰偄側偄
丂丂丂丂倃倄僗僥乕僕偱儅僀僐儞傪巊梡偟側偄捠怣僥僗僩偺曽朄傪捛壛偟傑偟偨丅捠怣偱偒側偄応崌偵偍帋偟壓偝偄丅
丂丂丂丂丂丂https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/mkchk/make02.htm
俀丏丂椼帴僷儖僗偺僥僗僩丂丂乮儅僀僐儞偐傜儌乕僞乕僪儔僀僶乕偵僷儖僗偑偱偰偄傞偐妋擣偟傑偡乯丂丂丂丂2009.6.1丂捛婰/廋惓拞
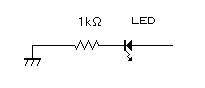 儅僀僐儞偺俹俛侽乣俹俛俈乮侾俀僺儞偐傜侾俋僺儞乯偵僥僗僩梡俴俤俢傪愙懕偟傑偡丅
儅僀僐儞偺俹俛侽乣俹俛俈乮侾俀僺儞偐傜侾俋僺儞乯偵僥僗僩梡俴俤俢傪愙懕偟傑偡丅
彫偝側俴俤俢偲侾俲兌乣侾丏俆俲兌掱搙偺掞峈傪捈楍偵偮側偓丄婎斅偺傾乕僗偵敿揷偢偗偟偰偍偒傑偡丅
俴俤俢偺懌偑挿偄曽偑恾偺塃偵側傝傑偡丅俆倁偵愙懕偡傟偽岝傝傑偡丅
僠僃僢僋僺儞傪俬俠偺懌偵傂偭偐偗傞応崌偼丄帠屘杊巭偺堊丄堦扷揹尮傪俷俥俥偟傑偟傚偆丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂弌椡億乕僩摨巑偺僔儑乕僩偱丄儅僀僐儞傪夡偝側偄傛偆偵丅
丂丂
丂
丂丂丂僥僗僩偼丄扙挷僥僗僩偺婡擻傪巊偆偺傪偍姪傔偟傑偡丅儌乕僞乕傪抐懕揑偵夞偟懕偗偨曽偑丄僠僃僢僋偟傗偡偔丄
丂丂丂儌乕僞乕偺摦嶌帪丄丂掆巭帪偺忬懺曄壔偑暘偐傝傗偡偄偱偡丅
丂丂丂https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/xystage/xystage.htm丂乮嵟屻偐傜忋偵俇僽儘僢僋乯
丂丂丂200倣sec枅偵儌乕僞傪夞偣偽丄偙傟偵摨婜偟偰俴俤俢偑岝傝傑偡丅
丂丂丂擮偺偨傔丄慡偰偺億乕僩偑丄岝傞偺傪妋擣偟傑偟傚偆丅
丂丂丂丂丂
丂丂丂倃丄倄椉曽僥僗僩偟傑偡丅
丂丂丂惂屼婎斅偺揹尮傪愗傝傑偡丅
丂丂丂[惓偟偔側偄応崌峫偊傜傟傞帠]
丂丂丂丒俤俤俹俼俷俵偺僨乕僞偑惓偟偔側偄丅
丂丂丂丒儅僀僐儞偺億乕僩偑攋夡偝傟偰偄傞
丂丂丂
俁丏丂儌乕僞乕偺夞揮僥僗僩
丂丂丂俿俙俈俀俆俈俹乮俇斣僺儞乯偺儌乕僞乕僪儔僀僽抜傪丄揹尮偵愙懕傪偟丄儌乕僞乕傕愙懕偟傑偡丅
丂丂丂儌乕僞乕偼憲傝僱僕傪奜偟晧壸側偟偺忬懺偱偡丅
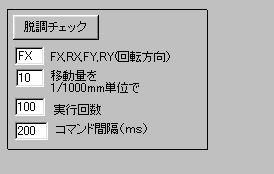
丂丂丂侾丏偺乮俀乯偲摨條偵堏摦僐儅儞僪傪憲傝傑偡丅儌乕僞乕偼夞傝傑偟偨偐丠丂倃倄丄惓媡傪妋擣偟傑偡丅
丂丂丂僀儞儔僀儞僇儔乕偺崟偄僱僕偺埵抲傪尒傟偽侾倣倣堏摦偱俀夞乮俵俁偺応崌乯夞傟偽俷俲偱偡丅
丂丂丂XY僗僥乕僕偑姰惉偟偰偄傞応崌偼丄憲傝僱僕傪愙懕偟偰丄摦偐偟偰傒傑偟傚偆丅夞揮僗僺乕僪偑揔摉偱側偄応崌偼丄
丂丂丂侾倣倣堏摦偱丄摨偠応強偵掆巭偟傑偣傫丅崌傢側偄応崌偼丄晄夣側壒乮價乕價亅乯偱夞傞応崌傕偁傝傑偡丅僗僺乕僪傪崌傢偣傟偽丄
丂丂丂寉偄壒乮僋乕僋乕乯偱夞傝傑偡丅嵟揔抣偼丄倃倄僗僥乕僕偺峔憿丄晧壸偵傛傝偐側傝嵎偑弌傑偡丅倃丄倄偺嵟揔抣偼丄堎側傞応崌偑懡偄
丂丂丂偺偱丄屄暿偵挷惍偟傑偡丅弶婜忬懺偼丄俆侽偵愝掕偟偰偁傝傑偡丅嵟掅懍搙傪曄峏偟偰挷惍偟傑偡丅抣傪戝偒偔偡傞偲抶偔側傝丄抣傪彫偝偔
丂丂丂偡傞偲丄懍偔側傝傑偡丅
丂丂
丂巹偺嶌惉偟偨儅僀僐儞僜僼僩偼丄嵟崅懍搙傪巊梡偟傑偣傫丅僜僼僩偺僶乕僕儑儞偵傛傝嵟崅懍搙傪柍帇偡傞傕偺偲丄儅僀僐儞偑斀墳偣偢
丂丂丂庴怣僞僀儉傾僂僩偵側傞応崌偑偁傝傑偡丅嵟崅懍偵僛儘傪巜掕偡傟偽丄晄嬶崌偼丄婲偙傝傑偣傫丅
丂丂丂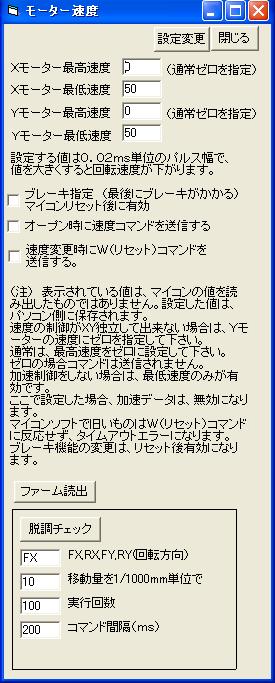
丂丂丂惂屼婎斅偺揹尮傪愗傝傑偡丅
丂丂丂幚嵺偺応崌偼丄帺摦僆乕僾儞偑妝側偺偱帋偟偰壓偝偄丅儊僯儏乕偺丂愝掕丂[儌乕僞乕愝掕乿丂丄僆乕僾儞帺摦傪慖戰丅
丂丂丂惂屼婎斅偺揹尮傪俷俶偵偟丄俻俠俙俵俥俿婲摦帪偵僆乕僾儞偝傟傞帠傪妋擣偟傑偡丅丂丂
丂丂[夞揮曽岦乶
丂丂丂夞揮曽岦偑丄儌乕僞偺庢傝偮偗埵抲摍偵傛傝媡偵夞傞応崌偼丄係杮偺攝慄弴傪媡偵偡傟偽斀懳偵夞傝傑偡丅
丂丂丂丂丂丂俬俠侾乮枖偼俬俠俁乯TA7253P 丂3 僺儞 ------- 墿丂
丂丂 丂丂丂丂丂丂 丂 丂丂丂丂丂丂丂丂丂丂5 僺儞 ------- 惵
丂丂丂丂丂丂俬俠俀乮枖偼俬俠係乯TA7253P丂 3 僺儞 ------- 愒
丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂丂丂 5 僺儞 ------- 敀
丂丂丂丂偙傟傪師偺傛偆偵愙懕偡傟偽媡偵夞傝傑偡丅
丂丂丂丂丂丂 俬俠侾乮枖偼俬俠俁乯TA7253P 3 僺儞 ------- 敀
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
5 僺儞------- 愒
丂丂丂丂丂丂俬俠俀乮枖偼俬俠係乯TA7253P 3 僺儞------- 惵
丂丂丂丂丂丂丂丂丂 丂丂丂丂丂丂丂丂丂5 僺儞------- 墿丂
丂丂 [夞傜側偄応崌]
丂丂丂丒儌乕僞乕偵僷儖僗偑弌偰偄傞偐丄俀丏偱巊梡偟偨僥僗僞乕乮俴俤俢偲掞峈乯傪俿俙俈俀俆俈俹偺弌椡傪僠僃僢僋偟傑偡丅
丂丂丂丂扐偟丄儌乕僞乕僪儔僀僽抜偺揹埑偑崅偄応崌偼丄掞峈傪憹傗偡昁梫偑偁傝傑偡丅
丂丂丂丂俿俙俈俀俆俈俹偺俁丆俆僺儞偵僥僗僩梡俴俤俢傪愙懕偟傑偡丅
丂丂丂丂忋婰偲摨條偵丂扙挷僠僃僢僋偺婡擻傪巊偆偙偲傪偍姪傔偟傑偡丅
丂丂[夞傜側偄応崌峫偊傜傟傞帠]
丂丂丂丒僪儔僀僽抜偺揹尮偑愙懕偝傟偰偄側偄丅
丂丂丂丒愝掕僗僺乕僪偑懍偡偓傞丅
丂丂丂丒儌乕僞乕偲偺寢慄傪娫堘偊偰偄傞丅
丂丂丂丒儌乕僞乕偑夡傟偰偄傞
丂丂丂丒俤俤俹俼俷俵偱偺愝掕乮僶僀億乕儔乛儐僯億乕儔丄侾憡乛俀憡乛侾亅俀憡偑丄儌乕僞乕偲崌偭偰偄側偄乯
丂丂丂丒儌乕僞乕僪儔僀僶乕抜偺岆攝慄乮儅僀僐儞偲偺愙懕摍乯
丂丂丂丒俿俙俈俀俆俈俹偑攋夡偝傟偰偄傞丂丂丂丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂栠傞