摦嶌尨棟丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽侽俀丏侽係丏侾俇丂丂倴倕倗倎
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽侽俀丏侽係丏侾俈
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽侽俀丏侽係丏侾俉
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俀侽侽俀丏侽俇丏侽俋
丂
丂俿俙俈俀俆俈俹偲俙俢俵俀俁俀俙俙俶偵偮偄偰愢柧偟傑偡丅
丂
侾丏丂俿俙俈俀俆俈俹
丂丂丂偙偺慺巕偼丄俢俠儌乕僞乕梡偺僽儕僢僕僪儔僀僶乕偱偡丅俢俠儌乕僞乕偺惂屼偱夞揮丄僽儗乕僉丄媡夞揮側偳偑偱偒傑偡丅
丂丂丂壓偼丄僨乕僞亅僔乕僩偐傜乮偙偭偦傝乯僐僺乕偟偨傕偺偱偡丅嘊嘍偺愭偵偼儌乕僞乕偑晅偄偰偄偰俢俠儌乕僞乕偱偡偑丄
丂丂丂崱夞偼丄僷儖僗儌乕僞乕偺曅曽偺僐僀儖偱偡丅
丂
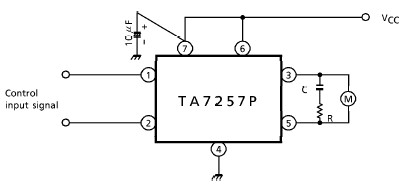
嘆丄嘇丂偱儌乕僞乕偵棳偡揹棳岦偒傪惂屼偟傑偡丅
嘑偼儘僕僢僋梡偺揹尮偱崱夞偼丄俆倁偱巊梡偟傑偡丅
嘐偼丄儌乕僞乕梡偺揹尮偱丄巹偼偙偙傪僯僢僇僪揹抮
傪巊梡偟偰偄傑偡丅
嵍偺夞楬偼丄嘐丄嘑傪嫟捠偺揹尮偵側偭偰偄傑偡偑暿揹尮
偵偟偰傕偐傑偄傑偣傫丅
儌乕僞乕偵墳偠偰侾俉倁傑偱崅偔偱偒傑偡丅
丂丂丂崱夞巊梡偡傞僶僀億乕儔僞僀僾偺僷儖僗儌乕僞乕偼丄僐僀儖偑俀慻偁傝丄揹棳偺棳偡曽岦傪惂屼偡傞昁梫偑偁傝傑偡丅
丂丂丂偙傟偼幚嵺偺倃倄僗僥乕僕偺夞楬恾偺堦晹偱偡丅
丂丂丂丂丂丂丂丂丂丂
丂丂丂丂丂丂僐僀儖偺揹棳偺岦偒偼丄嘆丄嘇丂偺揹埑偱惂屼偟傑偡丅崱夞偼偙偙傪丄儅僀僐儞偱惂屼偟傑偡丅
| 丂丂嘆僺儞丂丂 | 丂丂嘇僺儞丂丂 | 丂揹丂棳丂偺丂岦偒 | 丂丂儌乕僪丂丂 | 丂崱夞偺巊梡丂丂 | 丂丂丂丂旛丂丂丂丂丂丂峫 |
| 丂丂侽倁 | 丂丂俆倁 | 丂嘊丂<-丂嘍丂 | 丂 | 丂夞揮偱巊梡 | 丂 |
| 丂丂俆倁 | 丂丂侽倁 | 丂嘊丂->丂嘍 | 丂 | 丂夞揮偱巊梡 | 丂 |
| 丂丂侽倁 | 丂丂侽倁 | 丂棳傟側偄 | 丂僗僩僢僾 | 丂掆巭拞 | 儌乕僞乕幉偼丄帺桼偵夞偣傞 |
| 丂丂俆倁 | 丂丂俆倁 | 丂棳傟側偄 | 丂僽儗乕僉 | 丂掆巭帪 | 掆巭帪偺僽儗乕僉丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |
丂丂倃倄僗僥乕僕偱儌乕僞乕偺掆巭拞偼丄嘆丆嘇偑侽倁偺忬懺偱偡丅僐僀儖偵揹棳偑棳傟偢幉偑掞峈側偔帺桼偵夞偣傞忬懺偱偡偐傜
丂丂巜偱憲傝僱僕傪夞偟偰丄僙僢僩傾僢僾偡傞偙偲偑偱偒傑偡丅
丂
丂丂俬俠傪俀乮俬俠俙偲俬俠俛乯偮巊偄侾憡椼帴偱僷儖僗儌乕僞乕乮僐僀儖侾丄僐僀儖俀乯傪夞偡応崌偼丄師偺條偵側傝傑偡丅丂丂丂
| Seq | ICA偺嘆 | IC俙偺嘇 | 俬俠俛偺嘆 | 俬俠俛偺嘇 | 僐僀儖侾 | 僐僀儖俀 | 丂丂丂丂丂丂丂丂旛丂丂丂丂丂丂丂峫丂丂丂丂丂丂丂丂丂丂 | 丂 |
| 1 | 俆倁 | 侽倁 | 侽倁 | 侽倁 | 丂亄 | 丂 | 丂 | 丂 |
| 2 | 侽倁 | 侽倁 | 俆倁 | 侽倁 | 丂 | 丂亄 | 丂 | 丂 |
| 3 | 侽倁 | 俆倁 | 侽倁 | 侽倁 | 丂亅 | 丂 | 侾偲偼媡岦偒偵揹棳偑棳傟傞 | 丂 |
| 4 | 侽倁 | 侽倁 | 侽倁 | 俆倁 | 丂 | 丂亅 | 俀偲偼媡岦偒偵揹棳偑棳傟傞 | 丂 |
| 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 |
| 丂 | 俆倁 | 俆倁 | 俆倁 | 俆倁 | 丂 | 丂 | 掆巭帪偼僽儗乕僉 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 | 丂 |
| 丂 | 侽倁 | 侽倁 | 侽倁 | 侽倁 | 丂 | 丂 | 掆巭拞偼儌乕僞乕幉偼丄帺桼偵夞偣傞 | 丂 |
丂丂侾亅俀憡椼帴偱偼丂偙偺傛偆偵側傝傑偡丅侾憡椼帴偺奺僗僥僢僾偱偄偒側傝愗傝懼偊偢偵丄摨帪偵揹棳傪棳偡忬懺偑擖傝傑偡丂丂
| Seq | ICA偺嘆 | IC俙偺嘇 | 俬俠俛偺嘆 | 俬俠俛偺嘇 | 僐僀儖侾 | 僐僀儖俀 | 丂丂丂丂丂丂丂丂旛丂丂丂丂丂丂丂峫丂丂丂丂丂丂丂丂丂丂 | 丂 |
| 1 | 俆倁 | 侽倁 | 侽倁 | 侽倁 | 丂亄 | 丂 | 丂 | 丂 |
| 2 | 俆倁 | 侽倁 | 俆倁 | 侽倁 | 丂亄 | 丂亄 | 丂 | 丂 |
| 3 | 侽倁 | 侽倁 | 俆倁 | 侽倁 | 丂 | 丂亄 | 丂 | 丂 |
| 4 | 侽倁 | 俆倁 | 俆倁 | 侽倁 | 丂亅 | 丂亄 | 丂 | 丂 |
| 5 | 侽倁 | 俆倁 | 侽倁 | 侽倁 | 丂亅 | 丂 | 丂 | 丂 |
| 6 | 侽倁 | 俆倁 | 侽倁 | 俆倁 | 丂亅 | 丂亅 | 丂 | 丂 |
| 7 | 侽倁 | 侽倁 | 侽倁 | 俆倁 | 丂 | 丂亅 | 丂 | 丂 |
| 8 | 俆倁 | 侽倁 | 侽倁 | 俆倁 | 丂亄 | 丂亅 | 丂 | 丂 |
| 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 |
| 丂 | 俆倁 | 俆倁 | 俆倁 | 俆倁 | 丂 | 丂 | 掆巭帪偼僽儗乕僉丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 | 丂 |
| 丂 | 侽倁 | 侽倁 | 侽倁 | 侽倁 | 丂 | 丂 | 掆巭拞偼儌乕僞乕幉偼丄帺桼偵夞偣傞 | 丂 |
丂
俀丏丂俙俢俵俀俁俀俙俙俶
丂俼俽亅俀俁俀俠偼丄僐儞僺儏乕僞偲僐儞僺儏乕僞娫傪寢傇偨傔偺栺懇帠偱偡丅崅懍偵捠怣偱偒傑偣傫偑丄嫍棧傪挿偔乮悢廫倣乯偱偒傞
摿挜偑偁傝傑偡丅僷僜僐儞撪偼丄捠忢侽倁丄俆倁偱僨乕僞傪傗傝偲傝偟偰偄傑偡偑丄俆倁偱偼挿偄嫍棧傪怢偽偡偲揹埑偑庛偔側傝揱憲偱
偒側偔側偭偰偟傑偟傑偡丅
偦偙偱丄働乕僽儖娫偼婯奿偱偼丄亅侾俆倁枖偼亄侾俆倁乮嵎偼丄俁侽倁乯偲揹埑傪戝偒偔偟偰丄亅俁丄亄俁倁傑偱庛偔側偭偰傕揱憲偱偒傞傛偆
偵偟偨傢偗偱偡丅
壓偺條偵丂俆倁偼丄僩儔儞僗儈僢僞乕偱亅俋倁偵偟丄乮働乕僽儖偺娫偼亅俋倁乯丄庴偗庢偭偨屻儗僔乕僶乕偱俆倁偵捈偟傑偡丅
丂丂丂丂丂 丂
侽倁偼丄僩儔儞僗儈僢僞乕偱亄俋倁偵偟丄乮働乕僽儖偺娫偼亄俋倁乯丄庴偗庢偭偨屻儗僔乕僶乕偱侽倁偵捈偟傑偡丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮丂俙俢俵俀俁俀俙俙俶偼丄亇侾俆倁偱偼側偔亇俋倁偵曄姺偟傑偡乯丂丂丂丂
丂->->->->->->->丂怣崋偺岦偒丂->->->->->->->->->->->->->->->->->->->->->->
| 丂丂丂丂丂丂 | 丂 | 蔬亢軦 | 丂 | TM | 丂 | 丂丂 | 丂働乕僽儖忋 | 丂 | 丂 | 丂 | 俼倁 | 丂 | 蔬亢軧(喜狠) |
| 丂 | 丂 | 丂 | 5V | 丂 | -9V | 丂 | 丂丂亅俋倁 | 丂 | 丂 | -9V | 丂 | 5V | 丂 |
| 丂丂丂丂丂丂丂 | 丂 | 丂 | 0V | 丂 | +9V | 丂 | 丂丂亄俋倁 | 丂 | 丂 | +9V | 丂 | 0V | 丂 |
| 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂柍愙懕 | 丂 | 丂 | 0V | 丂 | 5V | 丂 |
| 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 | 丂 |
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂俿俵:僪儔僀僶乕乮僩儔儞僗儈僢僞乕乯
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂RV:儗僔乕僶乕
丂梫偡傞偵丄僐儞僺儏乕僞乮僷僜僐儞乯偺弌岥偲擖岥偱丄曄姺傪峴偆傢偗偱偡丅

偦偙傪丄俙俢俵俀俁俀俙俙俶偱峴偭偰偄傑偡丅丂
亅侾侽倁偲丄亄侾侽倁偼丄俆倁偐傜嶌傝弌偡堊偵丄僐儞僨儞僒傪偨偔偝傫巊偄傑偡丅恾偺忋偲拞偺僽儘僢僋丅愄偼丄亅侾侽倁丄亄侾侽倁偺揹尮傪梡堄偟偨傜偟偄偱偡丅
壓偺僽儘僢僋偺俿侾丄俿俀偼丄僐儞僺儏乕僞偺弌岥偱巊梡偡傞僩儔儞僗儈僢僞偱丄俆倁偼丄亅俋倁偵丄侽倁偼丄亄俋倁偵曄姺偟傑偡丅
俼侾丄俼俀偼僐儞僺儏乕僞偺擖岥偱巊梡偡傞儗僔乕僶乕偱丄亅俋倁傪俆倁偵丄亄俋倁傪侽倁偵曄姺偟傑偡丅
偙偺俬俠偼丄侾侽丄侾侾偼撪晹偱僾儖傾僢僾乮拲乯偟偰偄傑偡丅廬偭偰丄
愙懕偑側偄忬懺偼丄俿侾丄俿俀傪捠偭偨偁偲偼亅俋倁偵側傝傑偡丅
俼侾丄俼俀偼撪晹偱僾儖僟僂儞偟偰偄傑偡偐傜丄働乕僽儖偑奜傟偰
偄傞応崌乮愙懕偑柍偄応崌乯偼侽倁偱偡丅
偙偺偨傔僷僜僐儞偐傜棃傞働乕僽儖偺揹埑傪寁傟偽丄怣崋態偺嬫暿偑娙扨偵偱偒傑偡丅
乮拲乯丂僺儞屳姺偱傕僾儖傾僢僾柍偄傕偺偑偁傞偺偱拲堄丅
崱夞偼倃倄僗僥乕僕偺惂屼婎斅偱偼丄俿俀丄俼俀偺傒傪巊梡偟傑偡丅
俶倧丏俈丄俶倧丏俉丂傪僷僜僐儞偲愙懕偟丄
俶倧丏俋丄俶倧丏侾侽傪婎斅撪偱俙倁俼儅僀僐儞偲愙懕偟傑偡丅
丂
丂丂丂僷僜僐儞偺俠俷俵億乕僩偵傕摨條側晹昳偑偁傝傑偡丅
丂丂丂 僷僜僐儞偲愙懕偡傞応崌偼丄亅俋倁偲侽倁摨巑傪愙懕偡傟偽俷俲偱偡丅
丂
丂丂[嶲峫]
丂丂丂丂COM億乕僩偺揹埑傪幚嵺偵寁偭偰傒傞偲寢峔堘偄傑偡丅
| 丂丂丂丂丂丂丂丂丂 | 丂ADM232AAN丂 | 丂僷僜僐儞俙丂丂 | 丂僷僜僐儞俛丂丂丂 | 丂SP202ECP丂丂 | 丂SP3232ECP丂丂 |
| 丂僪儔僀僶乕偺俷倀俿懁 乮俶倧丏俁僺儞乯 | 丂亅俋丏侾侽倁 | 丂亅侾侾丏俇俉倁 | 丂亅俉丏俉俁倁 | 丂亅俉丏俀俁倁 | 丂 |
| 丂儗僔乕僶乕 偺俬俶懁丂乮俶倧丏俀僺儞乯 | 丂係丏俀m倁 | 丂侾俇侽倣倁 | 丂俀侽倣倁 | 丂亄侽丏侽俁倣倁 | 丂 |
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 丂栠傞
丂