丂
丂丂
丂SS2000
SW-BOX丂丂丂丂丂丂丂倴倕倗倎丂丂2006.3.03乣
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂夵丂丂丂丂2006.3.21
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂夵丂丂丂丂2006.11.30丂丂乮俙倁俼斉乯
丂丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
夵丂丂丂丂2007.11.18 丂乮pic斉僜乕僗乯
丂僗僇僀僙儞僒乕偺奜晹僗僀僢僠儃僢僋僗偱偡丅
丂僗僇僀僙儞僒乕偼丄俵俬俶俬 俢俬俶 俉俹
偺僐僱僋僞偑偁傝僷僜僐儞側偳偲愙懕偟丄奜晹偐傜偦偺摦偒
丂傪僐儞僩儘乕儖偱偒傑偡丅
丂偙偙傪僷僜僐儞偱偼側偔丄侾僠僢僾儅僀僐儞偐傜僐儞僩儘乕儖偡傞偙偲傕偱偒傑偡丅寉検側俽倂丂俛俷倃
丂傪嶌傟偽丄挿帪娫夣揔偵憖嶌偡傞偙偲偑偱偒傑偡丅
丂巹偼丄俽俽俀侽侽侽傪帩偭偰偄傑偣傫偑丄傢偗偁偭偰俽俽俀侽侽侽偺僔儕傾儖億乕僩偵愙懕偡傞
丂俽倂亅俛俷倃偺僜僼僩乮僼傽乕儉乯傪嶌惉偟傑偟偨丅丂棅傑傟偨傢偗偱傕側偄傫偱偡偑丅
丂偣偭偐偔嶌偭偨偺偩偐傜丄岞奐偟傑偡丅丂俽俽俀侽侽侽傪帩偭偰偄傞恖偑岾偣偵側傟偽椙偄
丂偲巚偄傑偡偑丄晄岾偵偟偰俽俽俀侽侽侽傪夡偡偙偲傕峫偊傜傟傞偺偱丄惢嶌偡傞恖偼丄嵟埆
丂傪妎屽偟偨曽偑椙偄偐傕偟傟傑偣傫丅
丂枖偙偺俫俹偺撪梕偑棟夝偱偒側偄応崌偼丄俽俽俀侽侽侽傪夡偡妋棪戝側偺偱惢嶌傪巭傔偨傎偆偑椙偄偱偟傚偆丅丂丂丂丂丂
丂
丂偁傞僒僀僩乮侾僠僢僾儅僀僐儞偐傜丄俽俽俀侽侽侽惂屼乯傪嶲峫偵偟傑偟偨丅
丂嶲峫僒僀僩偺僼傽乕儉乮傾僙儞僽儔僜乕僗乯偺婡擻傪傎傏偦偺傑傑嵞尰偟偰偁傝傑偡丅
丂堎側傞揰偼丄僉乕傪摨帪偵墴偟偨応崌丄僆儕僕僫儖偼丄桪愭搙偵廬偄侾偮偺僐儅儞僪偟偐敪怣偟傑偣傫偑丄摉僼傽乕儉
丂偱偼丄暋悢偺僐儅儞僪傪岎屳偵敪怣偡傞偙偲偱偡丅
丂幚尡梡婎斅傪惢嶌偟丄摦嶌妋擣偼丄幚尡婎斅偲僷僜僐儞傪愙懕偟偰峴偄傑偟偨丅僷僜僐儞偱庴怣偱偒偨偺偱丄俽俽俀侽侽侽偱傕
丂庴怣偱偒傞偲巚偄傑偡丅
婡擻
丂丂丂係屄偺俽倂偑偁傝丄儃僞儞傪墴偟偰偄傞娫僔儕傾儖億乕僩偵壓婰僐儅儞僪傪弌偟傑偡丅
丂丂丂俽倂亅俤丂丗丂仈俵倕仈
丂丂丂俽倂亅倂 丗丂仈俵w仈丂
丂丂丂俽倂亅俽丂丗丂仈俵s仈
丂丂丂俽倂亅俶丂丗丂仈俵n仈丂
丂丂丂丂乮拲乯丂奺僐儅儞僪偺屻傠偵偼丄夵峴僐乕僩乮侾俇恑僐乕僪偱丄侽俢丄侽俙乯偑晅偒傑偡丅
丂丂丂偙傟偱丄捛旜帪偵帇栰拞怱偐傜彮偟偢傟偨帪偵挷惍偱偒傞乮傜偟偄乯丅
丂丂丂儃僞儞傪摨帪偵墴偟偨偲偒偼丄暋悢偺僐儅儞僪偑戙傢傞戙傢傞弌傑偡丅乮僆儕僕僫儖偲堎側傞乯
丂丂丂椺偊偽丄俽倂亅俤丂偲丂俽倂亅俽
傪摨帪偵墴偟偨応崌
丂丂丂丂仈俵倕仈
丂丂丂丂仈俵倱仈丂
丂丂丂丂仈俵倕仈
丂丂丂丂仈俵倱仈丂
丂丂丂丂仈俵倕仈
丂丂丂丂仈俵倱仈丂
丂丂丂丂偺傛偆偵側傝傑偡丅丂倱倱俀侽侽侽偺巇條偼傢偐傝傑偣傫偑丄撿搶曽岦偵堏摦偱偒傞偐傕偟傟傑偣傫丅
丂丂
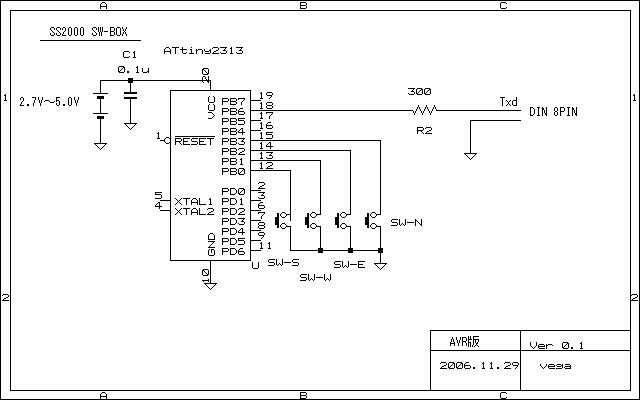
夞楬恾
丂丂丂丂丂丂丂丂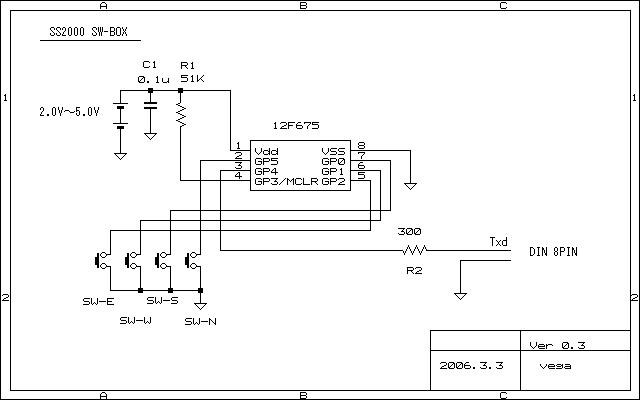
丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂僔儞僾儖偵偟傑偟偨丅丂懡彮宱尡偑偁傞側傜娙扨偵惢嶌偱偒偦偆偱偟傚丅
丂丂丂丂丂丂丂丂俹俬俠侾俀俥俇俈俆偼丄撪晹偵敪怳巕傪帩偭偰偄傞偺偱乮係俵倛倸乯奜晹晹昳傪徣棯偱偒傑偡丅
丂丂丂丂丂丂丂丂晛捠偼丄俼俽俀俁俀俠梡偲僪儔僀僶乕乛儗僔乕僶乕梡俬俠乮俵俙倃俀俁俀摍乯傪巊梡偟傑偡偑丄
丂丂丂丂丂丂丂丂偙偙偱偼丄俁侽侽兌侾屄偱嵪傑偣偰偄傑偡丅庴怣懁偺鑷抣偼丄晛捠侾乣俀倁偺娫偵偁傞偙偲傪棙梡偟偰
丂丂丂丂丂丂丂丂偄傑偡丅乮偙偙偵俵俙倃俀俁俀摍傪巊梡偟偰傕丄榑棟偑斀揮偟偰偄傞偺偱摦偒傑偣傫偺偱拲堄偟偰壓偝偄乯
丂丂丂丂丂丂丂丂俽倂偑億乕僩偵宷偑偭偰偄傞偩偗偱偡偑丄俹俬俠偺撪晹偵偁傞僾儖傾僢僾婡擻傪巊梡偟偰偄傑偡丅
丂丂丂丂丂丂丂丂俽倂傪暵偠傞偙偲偱億乕僩揹埑偑丄偍傛偦揹尮揹埑偐傜侽倁偵曄壔偟傑偡丅
丂丂丂丂丂丂丂丂俼侾偼丄僾儖傾僢僾掞峈側偺偱丄侾侽俲乣俀侽侽俲掱搙側傜乮偨傇傫乯俷俲偱偡丅戝偒偄曽偑徣僄僱丅
丂丂丂丂丂丂丂丂揹尮俽倂傗揹尮昞帵梡俴俤俢偼昁梫偵墳偠偰偮偗偰壓偝偄丅偨偩偟揹抮嬱摦偺応崌丄俴俤俢傪晅偗傞偲揹抮偑
丂丂丂丂丂丂丂丂挿傕偪偟傑偣傫丅
丂丂丂丂丂丂丂丂揹尮偼埨掕壔偡傞昁梫偼偁傝傑偣傫偑丄偁傑傝掅偄偲儅僀僐儞偼摦偄偰傕丄捠怣偱偒側偔側傞嫲傟偁傝傑偡丅
丂丂丂丂丂丂丂丂侾俀俥俇俀俋偱傕摨偠夞楬偱懡暘摦嶌偡傞偲巚偄傑偡丅丂僼傽乕儉偼丄侾俀俥俇俀俋梡傪巊梡偟偰壓偝偄丅
丂俽俽俀侽侽侽偲偺愙懕
丂丂丂丂丂丂丂丂偙偙偵俽俽俀侽侽侽偺愢柧彂偑偁傝丄俵俬俶俬丂俢俬俶俉丂僺儞偲偺愙懕曽朄偑偁傝傑偡丅
丂丂丂丂丂丂丂丂http://homepage2.nifty.com/STARCAMP/sub0449.html
丂丂丂丂
 丂丂偙偺僐僱僋僞偼丄嵍塃旕懳徧偱偡丅 丂丂偙偺僐僱僋僞偼丄嵍塃旕懳徧偱偡丅 |
丂 |
| 恾偺岦偒偼丄俽俽俀侽侽侽偺儊僗僐僱僋僞傪惓柺偐傜尒偨岦偒乮偲巚傢傟傑偡乯 枖忋婰夞楬傪愙懕偡傞俵俬俶 俢俬俶 俉俹丂僆僗傪棤偐傜乮敿揷晅偗偡傞柺偐傜乯尒偨岦偒偱傕偁傝傑偡丅 |
丂 |
丂丂丂丂丂丂丂丂奼戝偡傞偲偙偺傛偆偵側偭偰偄傑偡丅
丂丂丂丂丂丂丂丂俵俬俶丂俢俬俶丂俉俹偺俼俽亅俀俁俀俠偱偺婯奿偼晄柧偱偡偑丄庤帩偪偺俢亅俽倀俛俋僺儞偲俵俬俶
俢俬俶 俉俹 偺愙懕働乕僽儖傕
丂丂丂丂丂丂丂丂怣崋慄偼偙偺傛偆偵側偭偰偄傑偟偨丅怣崋柤偼丄僷僜僐儞側偳奜晹偐傜尒偨柤慜偱偡丅
丂丂丂丂丂丂丂丂妋擣曽朄丂乮尰暔偑庤尦偵柍偄偺偱憐憸偱彂偄偰傑偡乯
丂丂丂丂丂丂丂丂丂丂丂俧俶俢
丂丂丂丂丂丂丂丂丂丂丂丂丂丂俽俽俀侽侽侽偺揹尮傪擖傟偰偄側偄忬懺偱揹尮偺傾乕僗抂巕偲僛儘兌枖偼僛儘兌偵嬤偄抣丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂揹尮傪擖傟偨忬懺偱丄偙偺揹埑乮揹尮傾乕僗偵懳偟偰乯偼侽倁丅
丂丂丂丂丂丂丂丂丂丂丂俿倶倓丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂俽俽俀侽侽侽偺揹尮傪擖傟偰偄側偄忬懺偱揹尮偺傾乕僗抂巕偵懳偟偰崅掞峈抣丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂揹尮傪擖傟偨忬懺偱乮揹尮傾乕僗偵懳偟偰乯侽倁偵嬤偄抣丅
丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂忋婰夞楬恾偺俿倶倓傪愙懕偟傑偡丅
丂丂丂丂丂丂丂丂摦嶌帪偵亅侾侽倁晅嬤枖偼丄亄侾侽倁晅嬤偺慄偼丄俽俽俀侽侽侽偐傜懠偵僨乕僞傪憲傞慄側偺偱
丂丂丂丂丂丂丂
寛偟偰愙懕偟偰偼側傝傑偣傫丅丂愙懕偡傞偲俽俽俀侽侽侽枖偼丄杮婡偑夡傟傞嫲傟偑偁傝傑偡丅
丂丂丂丂丂丂丂
丂僼傽乕儉僂僄傾 丂 俹俬俠侾俀俥俇俈俆梡僼傽乕儉
丂
丂丂丂丂丂丂丂丂丂偙傟傪儅僀僐儞偵彂偒崬傓昁梫偑偁傝傑偡丅
丂丂丂丂丂丂丂丂丂杦偳摨偠峔惉偺俹俬俠侾俀俥俇俀俋梡偺僼傽乕儉丂乮庤尦偵側偄偺偱摦嶌妋擣偟偰偄傑偣傫乯
丂僜乕僗丂丂丂丂丂忋婰僼傽乕儉傪惗惉偟偨僜乕僗偱偡丅埲慜嶌偭偨儅僋儘傪巊梡偟偰偄偰傢偐傝偵偔偄偲巚偄傑偡丅
丂丂丂丂丂丂丂丂丂 丂UP偡傞梊掕偱偐偭偨偺偱丄壔徬捈偟傕偟偰傑偣傫丅
丂丂丂丂丂丂丂丂丂丂MPLAB偱埲慜乮俀侽侽俇擭乯惗惉偱偒傑偟偨偑丄崱偺俵俹俴俙俛偱惗惉偱偒傞偐晄柧偱偡丅
丂丂丂丂丂丂丂丂丂丂俹俬俠侾俀俥俇俈俆梡偺僜乕僗丂丂
丂
丂徚旓揹棳丂丂俽倂傪墴偝側偄忬懺偱丂侽丏俁俁倣俙丂偱偟偨丅乮徣僄僱偵偟傑偟偨丅乯
丂丂丂丂丂丂丂丂丂俽倂傪墴偟偨忬懺偱偼丄侾丏俈俆倣俙偱偡丅
丂丂丂丂丂丂丂丂丂揹抮摦嶌偝偣傞応崌偼丄俴俤俢側偳梋寁側晹昳傪徣偗偽丄偐側傝揹抮偼挿傕偪偡傞偲巚偄傑偡丅
丂
丂揹尮丂丂丂丂丂俹俬俠侾俀俥俇俈俆帺懱偼丄俀倁乣俆丏俆倁傑偱巊梡偱偒傑偡丅
丂丂丂丂丂丂丂丂丂俆倁
偲丂俀丏俆俇倁乮庛偭偨僯僢僇僪俀杮乯傪巊梡偟丄偱僷僜僐儞偱捠怣偱偒傞偙偲傪妋擣偟傑偟偨丅
丂丂丂丂丂丂丂丂丂揹埑偑掅偄応崌丄儅僀僐儞帺懱偼摦嶌偟偰傕捠怣偱偒側偄応崌偑偁傞偐傕偟傟傑偣傫丅丂丂丂丂丂丂
丂僷乕僣丂丂俹俬俠侾俀俥俇俈俆偼丄壓婰偱擖庤壜擻偱偡丅丂埨壙丅
丂丂丂丂丂丂丂廐寧丂丂http://akizukidenshi.com/catalog/g/gI-00253/
丂丂丂丂丂丂丂嫟棫丂丂丂
丂丂丂丂俹俬俠偺彂偒崬傒偵儔僀僞乕偑昁梫偱偡丅
丂丂丂丂丂丂丂丂http://feng3.cool.ne.jp/丂丂偙偙偱丄桳彏丄柍彏偺儔僀僞乕偑庤偵擖傝傑偡丅
丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂桳彏偺僔儑僢僾偼丂http://halfmat.ocnk.net/丂丂偱偡丅丂巹偼丄俼俠俢儔僀僞乕偑庤尦偵偁傝傑偡偑丄栤戣側偔
丂丂丂丂丂丂丂丂摦嶌偟偰傑偡丅
惢嶌
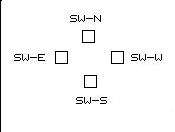
丂丂丂丂丂侾丏丂杮懱乮揹尮傕乯傪俽俽俀侽侽侽偺嬤偔偵抲偒丄俽倂偺傒働乕僽儖偱怢偽偡偺偑寉偔偰巊偄傗偡偄偲巚偄傑偡丅
丂丂丂丂丂丂丂丂儃僞儞俽倂偺埵抲娭學偼丄偙傫側姶偠偱丅
丂丂丂丂丂丂丂
 |
丂丂丂丂丂俀丏丂僼傽乕儉彂偒崬傒帪偼丄岺応弌壸帪偺廃攇悢峑惓偺抣傪彂偒偮傇偡偲慡偔摦偒傑偣傫偺偱丄拲堄偟偰壓偝偄丅
丂丂丂丂丂丂丂丂峑惓抣傪惓偟偔側偄抣乮34xx乯偵偟偨帪偼丄儅僀僐儞偑摦偄偰傕丄捠怣偱偒傑偣傫偺偱拲堄偟偰壓偝偄丅
丂丂丂丂丂丂丂丂峸擖屻丄嵟弶偐傜彂偒崬傑偢拞恎傪撉傒弌偟偰丄嵟廔傾僪儗僗偺撪梕傪儊儌偡傟偽丄傕偟彂偒偮傇偟偰傕暅媽偱偒傑偡丅
丂丂丂丂丂丂丂丂乮僠僢僾偺棤偵彂偒崬傫偱偍偔偲椙偄丅乯
丂丂丂丂丂丂丂丂俹俬俠儔僀僞乕僜僼僩偵傛傝丄乽偼偄乿乛乽偄偄偊乿偺巜掕岆傝偱娙扨偵曄傢偭偰偟傑偆偺偱丄梫拲堄偱偡丅
丂丂丂丂丂俁丏丂捠怣偺僠僃僢僋偼丄偄偒側傝俽俽俀侽侽侽偵愙懕偣偢僷僜僐儞傪憡庤偵偟偰僥僗僩偟偨曽偑椙偄偱偟傚偆丅
丂丂丂丂丂丂丂丂僷僜僐儞偲偺愙懕偼丄俽俽俀侽侽侽偲偺愙懕偺儕僴乕僒儖偩偲巚偭偨傎偆偑椙偄偱偡丅
丂 丂丂丂丂丂丂 d-sub9偺No.5僺儞偑俧俶俢丄俶倧.俀僺儞乮僗僩儗乕僩働乕僽儖偺応崌偼摨偠俶倧丏俀乯偑僷僜僐儞懁偺庴怣偱偡
丂丂丂丂丂丂丂丂偐傜偙偙偵俁侽侽兌偺愭傪愙懕偟傑偡丅
丂丂丂丂丂丂丂丂俶倧丏俀僺儞偼丄侽倁偱偡偐傜妋擣偟偰壓偝偄丅亄侾侽倁偲偐亅侾侽倁偲偐偵寛偟偰愙懕偟偰偼側傝傑偣傫丅
丂丂丂丂丂丂丂丂僷僜僐儞枖偼杮婡偑屘忈偡傞偐傕偟傟傑偣傫丅
丂丂丂丂丂丂丂丂嵟弶偺妋擣偼側傞傋偔俆倁嬤偔偺揹尮偱巊梡偟偔偩偝偄丅
丂丂丂丂丂丂丂丂儃僞儞俽倂偵廬偄丄僐儅儞僪偑弌傞偺傪妋擣偟傑偡丅
丂丂丂丂丂丂丂丂僜僼僩偼僴僀僷乕僞乕儈僫儖傪巊偟傑偡丅乮俋俇侽侽俛俹俬乯丂僴僀僷乕僞乕儈僫儖偺僙僢僩傾僢僾偼偙傟傪嶲峫偵
丂丂丂丂丂丂丂丂https://ss1.xrea.com/vega.s58.xrea.com/astro/mirror/h8gcc/part02.htm
丂丂丂丂丂丂丂丂俽倂墴偟丄壓婰偙偺傛偆偵儃僞儞偵懳墳偟偨僐儅儞僪偑昞帵偝傟偨傜惉岟偱偡丅
丂丂丂丂丂丂丂丂係屄偺儃僞儞偑婡擻偡傞偙偲傪妋擣偟偰壓偝偄丅
丂丂丂丂丂丂丂丂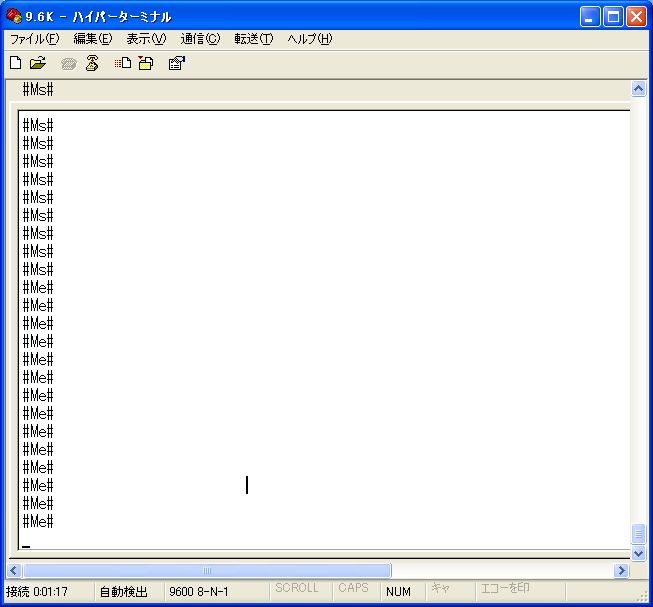
丂丂丂丂丂係丏丂僷僜僐儞偱摦偗偽丄俽俽俀侽侽侽偱傕俷俲偩偲巚偄傑偡丅丂丂丂丂丂
丂丂丂丂丂丂丂丂俽俽俀侽侽侽偺愙懕偼丄怲廳偵丅
丂丂丂丂丂丂丂丂揹尮傪揹抮偵偡傞応崌丄嵟弶偐傜俀屄偵偣偢丄摦嶌傪妋擣偟偰偐傜俀屄偵帋偟偰壓偝偄丅
丂丂丂丂丂丂丂丂僷僜僐儞偲俽俽俀侽侽侽偺庴怣懁偺乮俫丆俴偺乯鑷抣偼堘偄傑偡丅
丂丂丂丂丂丂丂丂揹抮俀屄偱僷僜僐儞偵捠怣偱偒偨偐傜偲偄偭偰丄俽俽俀侽侽侽傕庴怣偱偒傞偲偼尷傝傑偣傫丅媡傕丅
丂丂丂丂丂丂丂丂僷僜僐儞偑揹抮俀屄偱庴怣偱偒側偄偐傜偲偄偭偰丄俽俽俀侽侽侽傕庴怣偱偒側偄偲偼尷傝傑偣傫丅
丂丂丂丂丂丂丂丂枖徚旓揹棳偼彮側偄偱偡偑丄揹埑偑壓偑傞偲捠怣偱偒側偄偐傕乮挿帪娫巊梡偱偒傞側偄乯偟傟傑偣傫丅
丂丂丂丂丂丂丂丂晄埨掕側応崌偼丄揹抮俁屄傪偍姪傔偟傑偡丅
丂丂丂丂丂傕偟僷僜僐儞憡庤偱傕慡偔摦偐側偄応崌丅儅僀僐儞偑惗偒偰偄傞偺偐夡傟偰偄傞偺偐暘偐傝傑偣傫偹丅
丂丂丂丂丂枖嵟弶偵偙傟偱摦嶌傪妋擣偟偰偐傜丄僷僜僐儞偵愙懕偡傞曽朄傕椙偄偱偟傚偆丅
丂丂丂丂丂傑偢偙偺夞楬傪嶌傝傑偡丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
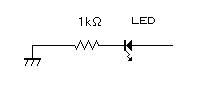 |
丂丂丂丂丂傑偢揹尮偵偮側偄偱丄岝傞偙偲傪妋擣偟偰壓偝偄丅揹埑偼俆倁偑椙偄偱偡丅
丂丂丂丂丂揹抮側傜俁屄丅丂偙傟傪侾俀俥俇俈俆偺俶俷丏俁僺儞偵愙懕偟傑偡丅
丂丂丂丂丂壗傕偟側偄応崌偼丄俴俤俢偼岝傝傑偣傫丅丂係屄偺儃僞儞偳傟偐傪墴偡偲丄俴俤俢揰柵偟傑偡丅偙傟偼捠怣偺僷儖僗
丂丂丂丂丂傪俴俤俢偺岝偱尒偰偄傞暘偗偱偡丅丂偙傟偼俹俬俠摦嶌偟偰偄傞偄偙偲傪昞偟偰偄傑偡丅丂俴俤俢偑岝傝捠怣偱偒側偄応崌
丂丂丂丂丂偼丄
乮壜擻惈偲偟偰乯丂丂俿倶倓偺攝慄傪妋擣偡側偳偟偰壓偝偄丅
丂丂丂丂丂岝傜側偄応崌丄儅僀僐儞偑摦偄偰偄傑偣傫丅夞楬傪妋擣偟偰壓偝偄丅丂夞楬偑惓偟傛偆側傜丄偙偺僥僗僩梡僼傽乕儉
丂丂丂丂丂偱摦偐偟偰偔偩偝偄丅丂僥僗僩梡僼傽乕儉丂乮侾俀俥俇俈俆梡偱偡偑侾俀俥俇俀俋偱傕懡暘摦嶌偡傞偲巚偄傑偡乯
丂丂丂丂丂廃攇悢峑惓抣傪巊梡偟偰偄側偄偺偱丄捠怣偼塣偑椙偔側偗傟偽偱偒側偄偲巚偄傑偡丅偟偐偟丄杮暔偺僼傽乕儉偑俽倂傪墴偟偰傕
丂丂丂丂丂俴俤俢偑岝傜偢丄偙偺僼傽乕儉偱岝傞側傜廃攇悢峑惓抣偑彂偒偮傇傟偰偄傑偡乮儅僀僐儞偼惗偒偰偄傑偡乯丅
丂丂丂丂丂儔僀僞乕傪巊梡偟丄儅僀僐儞偺撪梕傪撉傒弌偟偰偔偩偝偄丅
丂丂丂丂丂傾僪儗僗俁俥俥偺撪梕偑丄34倶倶偱側偄偼偢偱偡丅偙偺抣傪惓偟偔偡傞昁梫偑偁傝傑偡丅
丂丂丂丂丂偙偙傪嶲峫偵偟偰丄幐傢傟偨抣傪暅媽偟偰壓偝偄丅
丂丂丂丂丂http://www.geocities.jp/orange_denshi/writer509alpha.html丂丂幐傢傟偨僉儍儕僽儗乕僔儑儞僨乕僞傪媮傔偰
偦偺懠
丂丂丂儃僞儞傪墴偟偰偄傞娫丄僐儅儞僪偑愨偊娫側偔崅懍偵弌傑偡丅偙偙偑婥偑偐傝側揰偱偡乮僆儕僕僫儖傕摨偠乯丅
丂丂丂娫妘傪嬻偗偰弌偡乮帪娫摉偨傝偺憲怣僐儅儞僪偺悢傪尭傜偡乯偺偼娙扨側偺偱丄堏摦懍搙偑懍偡偓傞応崌
丂丂丂偼嫵偊偰偔偩偝偄丅
丂丂丂僜僼僩乮僼傽乕儉乯偺嬶崌偑埆偄応崌偼丄楢棈偔偩偝偄丅丂丂
丂丂俙倁俼斉偱偡丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂夵丂丂丂丂2006.11.30丂丂
ATtiny2313偼丄廐寧偱侾俀侽墌乮2006.11乯偱偡丅
挷惍曽朄偼丄忋婰偺俹俬俠偺傪嶲峫偵偟偰壓偝偄丅
徚旓揹棳偼丄係乣俆倣俙偱偡丅
徣僄僱斉偼丄儃僞儞傪墴偟偰偄側偄忬懺偱偼丄0.07m俙偺徚旓偲側傝丄俹俬俠斉傛傝徣僄僱偵側傝傑偟偨丅
揹抮偱摦嶌偼偝偣偰偄傑偣傫丅巇條偱偼丄俀丏俈倁埲忋偲側偭偰偄傞偺偱丄僯僢僇僪揹抮摍偺俀杮偱偼
摦偐側偄偐傕乮摦偄偰傕揹抮偑挿帩偪偟側偄偐傕乯偟傟傑偣傫丅
丂僜乕僗 丂丂丂丂丂丂丂丂ss2000-1.c
丂丂丂丂丂丂丂丂丂丂丂丂丂ss2000-2.c丂丂丂(徣僄僱斉)
丂hex僼傽僀儖側偳乮Winavr偱偺僜乕僗椶乯偼丄
丂 丂丂丂丂丂丂丂丂丂丂丂ss2000-avr1.lzh
丂丂 丂丂丂丂丂丂丂丂丂丂ss2000-avr2.lzh 丂(徣僄僱斉乯
丂僼儏乕僘價僢僩偼丄岺応弌壸帪偺傑傑偱巊梡偟傑偡丅
丂捠怣晹暘乮suart.s)偼丄chan偝傫偺傪棳梡偟偰傑偡丅丂
丂敪怳婍偼丄岺応弌壸帪偺俉俵倛倸偺侾乛俉暘廃丂偱丄1Mhz偲側傝傑偡丅丂
AVR偺儔僀僞乕偑昁梫偱偡偑丄偙偙傪嶲峫偵偟偰壓偝偄丅
https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/control/control.htm
偍姪傔偼丄chan偝傫偺偱偡丅丂COM億乕僩愙懕偺偼僉僢僩偑敪攧偝傟偰偄傑偡丅
巹傕巊梡偟偰傑偡乮僉僢僩偱偼偁傝傑偣傫偑乯丅
http://strawberry-linux.com/catalog/items?code=72001
丂
儔僀僞乕側傫偐丄惢嶌偱偒傞偐両丂偲偄偆恖傗倀俽俛愙懕偑忦審偺応崌偼丂俙倲倣倕倢偺弮惓儔僀僞乕偑偁傝傑偡丅乮\6,000)
偨偩偟屆偄愇乮AT90S2313,側偳乯偼丄懳墳偟偰偄傑偣傫丅
http://www.compass-lab.com/STK_CAN/ATAVRISP.htm
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俿俷俹傊