儘乕僞儕丒僄儞僐乕僟嶌惉
丂丂丂丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂倴倕倗倎
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂 丂丂丂丂丂丂丂丂 丂丂丂丂丂丂丂2003.0俀.丂
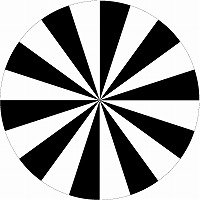
侾丏丂儘乕僞儕丒僄儞僐乕僟帺嶌梡僷僞乕儞嶌惉僜僼僩
丂丂丂暘妱悢偼丄崟幦偺杮悢偱偡丅壓偼丄暘妱悢傪1侽偱嶌惉丅
丂丂丂巻偵弌偟偰丄俷俫俹僔乕僩偵僐僺乕偡傞丅乮偦偺傑傑巊梡乮摟夁宆乯偡傞偐丄姶岝婎斅偺儅僗僋乮斀幩宆乯偱巊梡乯
丂丂丂巻偵弌偟偰偦偺傑傑巊梡偡傞丅乮斀幩宆乯
丂丂丂僩儗乕僔儞僌儁乕僷乕偵報嶞偡傞丅(姶岝婎斅偺儅僗僋乮斀幩宆乯偱巊梡乯
丂丂丂捈愙俷俫俹僔乕僩報嶞偡傞丅
丂丂丂側偳怓乆峫偊傜傟傑偡偑丄巹偼傑偩偳傟傕帋偟偰偄傑偣傫丅
丂丂丂壓偺昞帵偝傟偨僷僞乕儞偼丄夋柺偺枾搙偑慹偄偺偱偒傟偄偵昞帵偝傟傑偣傫偑幚嵺偵僾儕儞僩偲偡傞偲丄
丂丂丂僾儕儞僞枾搙偵墳偠偰鉟楉偵報嶞偱偒傑偡丅
丂丂丂枖塃懁偼丄忋偺幚峴椺偱摦偐偟偨応崌偱丄旕昞帵僄儕傾偺婡擻傪巊梡偟偰偄傑偡丅
丂丂丂恾宍偺拞怱偑傢偐傝偢傜偄応崌偼丄偙偺婡擻傪巊梡偟拞怱偺傒巆偣偽暘偐傝傗偡偄偱偡丅
 |
 |
丂丂丂 Rencov052.lzh 丂丂Ver 0.52丂俉俲倐
丂丂丂僷僞乕儞偼丄renco.bmp丂偺柤慜偱婲摦偟偨僼僅儖僟偵嶌惉偝傟傑偡丅
丂丂丂崅暘夝擻儘乕僞儕丒僄儞僐乕僟偺帺嶌偵惉岟偟偨傜丄巹偵僜僼僩壓偝偄丅丂乮僶僉僢乯
愒奜僼僅僩僀儞僞儔僾僞
丂丂丂幦偺擹扺傪撉傒庢傞堊偺慺巕偱偡丅斀幩宆偲摟夁宆偑偁傝傑偡丅婰帠偱偼斀幩宆傪巊梡偟丄
丂丂丂姶岝婎斅偺摵敁偺桳柍偵傛傞岝偺嫮庛傪撉傒庢偭偰偄傑偡丅
丂丂丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵丵
丂嶲峫帒椏
丂丂丂僩儔儞僕僗僞媄弍丂俀侽侽侾擭丂侾寧崋丂倫俁俀俁乣倫俁俁俇
丂丂丂乽柾宆儌乕僞乕梡埵抲丒懍搙僒乕儃僔僗僥儉偺惢嶌乿丂丂旤攏丂堦攷偝傫
丂丂丂http://www.cqpub.co.jp/toragi/DLF/TR0101M.htm丂丂岞奐偟偰傞僜僼僩僂僄傾
俹俬俠侾俇俥俉俈俁傪巊梡偟偨丄俢俠儌乕僞乕偺僒乕儃僔僗僥儉偱偡丅俹俬俠偱俙俢曄姺傪偟丄儘乕僞儕丒僄儞僐乕僟乕偺崅暘夝擻壔傪偟偰偄傑偡丅幦俉杮丄冇侾係倣倣偺僷僞乕儞傪巊梡偟丄俋侽侽倰倫倣偺夞揮悢偱偁傝側偑傜係侽侽僷儖僗乛侾夞揮丂偺暘夝擻傪幚尰偟偰偄傑偡丅
丂
扨弮偵捈宎傪侾侽攞偟幦俉侽杮偱丄係侽侽侽僷儖僗乛侾夞揮偵側傝傑偡丅夞揮僗僺乕僪偼斾妑偵側傜側偄掱抶偔夞偡偺偱婜懸偱偒傑偡丅摫擖偺堊偺愒宱丒愒堒幉偵偮偗傞傕偺側傜係侽侽侽僷儖僗乛侾夞揮偱廫暘偩偲巚偆偺偱丄婜懸偟偰傑偡丅
崅暘夝擻壔偺尨棟丂丂僼僅僩僀儞僞儔僾僞傪俀偮巊梡偟偰丄専弌偱偒傞揹棳乮掞峈傪捠偟偰揹埑乯傪俙俢曄姺偡傞丅
丂丂偙偺攇宍偑僒僀儞僇乕僽偑昤偔傛偆偵僷僞乕儞偺偲嫍棧傪挷惍偡傞丅
丂丂俀偮偺僒僀儞僇乕僽偺埵憡偑俋侽亱偢傟傞傛偆偵僼僅僩僀儞僞儔僾僞偺埵抲傪挷惍偡傞丅
丂丂俀偮偺僨僕僞儖抣偐傜丄侽亙儲亙俁俇侽偺抣傪媮傔傞丅
丂丂儲偺媮傔曽偼倎倲倎値偺寁嶼偼偣偢丄俀偮偺抣偐傜侾俇倃侾俇偺僥乕僽儖傪嶲徠偟偰寛傔傞偲偄偆傕偺偱偡丅
丂丂婰帠偱偼丄僔儞僋儘僗僐乕僾傪巊梡偟偰俋侽亱偺埵憡挷惍傪偡傞條偵側偭偰傑偡偑丄俀偮偺
丂丂抣傪僷僜僐儞偺夋柺忋偵儔儞僟儉偱椙偄偐傜僾儘僢僩偡傟偽丄僔儞僋儘僗僐乕僾偼側偔偰傕挷惍偱偒傞
丂丂傫偱偼側偄偐偲巚偭偰偄傑偡丅埵憡偑俋侽亱偢傟偰偄偨傜丄昞帵寢壥偼墌偵側傞偼偢偱偡偐傜丅
丂丂
丂丂俙俢曄姺側偳偟傑偡偐傜丄儅僀僐儞惂屼偵側偭偰偟傑偄傑偡偗偳丅
俀丏丂儘乕僞儕丒僄儞僐乕僟嶌惉丂丂丂乮寢壥偑弌偨傜捛壛偟傑偡乯
丂丂丂丂俙倁俼偺俙俿俋侽俽俉俆俁俆偐係係俁俁傪巊梡偡傞寁夋偱偄傑偡丅丂嶌椺偱偼丄俁俀倐倝倲偺壛嶼偱嬯楯偟偰偄傑偟偨偑丄俙倁俼亄俧俠俠偱偼
丂丂丂丂僐儞僷僀儔偑傗偭偰偔傟傞偺偱偙偙偼嬯楯偟傑偣傫丅
丂丂丂丂僀儞僞乕僼僃僀僗偼丄俽俹俬偺僀儞僞乕僼僃僀僗偱懠偺俠俹倀偐傜埵抲偺栤偄崌傢偣偵摎偊傞宍傪傑偢帋偟傑偡丅
丂丂丂丂捠忢偺俙憡丄俛憡偺僷儖僗弌椡偼戞俀僗僥僢僾偵側傝傑偡丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂俿俷俹