{kind=link}
K-00467

追尾装置
vega 2003.11.26~
名前は未定
a
市販品のドブドライバーと同様な機能。
経緯台(ドブ)が対象だが極軸がずれた赤道儀でも可能
2軸の直交性が狂っていてもOK。(たぶん)
軸と光軸の直交性が狂っていてもOK。(たぶん)
【コンセプト】
ハードソフト共にシンプル。
使い方もシンプル
カスタマイズは、プログラム修正もありうる。モーターのタイプ選択など)
(コンパイラは、無償コンパイラ(ルネサステクノロジ)を使用。)
【機能】
・パソコンは不要(ただしカスタマイズには使用)
・駆動方式
全周ウォームでもタンジェントスクリューでも可
スリップがなければ、何でもOK
偏芯したドブの耳軸のアイドラー駆動でもOK(倍率にもよるけど)
・2回の位置設定から自動追尾(最小自乗方での多項式近似)
2回 :1次式で近似
3回 :2次式で近似
4回 :3次式以下で近似
5回以上:4次式以下で近似
【制御方式】
複数の位置データから、X秒後の位置を予測して
その位置までX秒かけて移動するモーター速度を決める。
Xはカスタマイズする。
予測方式は最小二乗方で最大4次式
使用位置データ数は、変更可能(カスタマイズ)
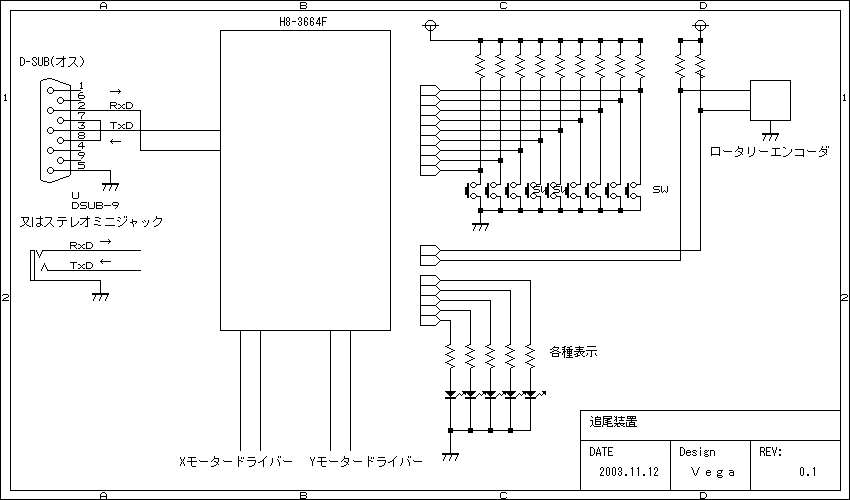
【回路】
こんな感じ
【操作】
1.電源ON
電源LEDがON
自動追尾LDEがOFF
XモーターLEDがON
モーターは停止
2.1回目の位置決め
SWでモーターを選択(LED切りか変わる)
速度調整ダイヤル回すとモーターが回転する。
視野の中心で「位置データ登録」ボタンを押す。
3.2回目の位置決め
SWでモーターを選択(LED切りか変わる)
速度調整ダイヤル回し位置を調整。
視野の中心で「位置データ登録」ボタンを押す。
自動追尾表示LEDが点灯し、自動追尾開始。
4.3回目以降の位置決め
「自動手動切り替えSW」を押して手動に。(LED消える)
モーターは切替時の速度で回る。
速度調整ダイヤルを回して視野中心に。
視野の中心で「位置データ登録」ボタンを押す。
自動追尾表示LEDが点灯し、自動追尾開始。
5.
「自動手動切り替えSW」を押して手動に。(LED消える)
再度押すと自動に戻る。(LED点灯)
このとき視野から外れていても、X秒後に視野に入る。
6. 速度ダイヤル感度
加速SWを押しながら、速度調整ダイヤルを右に回すと速度変化が急になる。
加速SWを押しながら、速度調整ダイヤルを左に回すと速度変化が穏やかになる。
感度はX,Y独立に変化。
7. 逆回転
案として
・逆回転SW
・速度ダイヤルを左に回しているとモータが止まり逆回転が始まる
【カスタマイズ】
望遠鏡を動かして、ベストの値に調整する。
案1)
作る人が、下記を書き替えてコンパイル。ソフトの手間がかからない。
(ノートパソコンを持ち出して、望遠鏡の脇で操作)
例)
#define xtime 20 /*
X秒後の位置で制御 10~100 秒 */
#define kando 40 /*
速度感度
10~300 */
#define pdmax 12 /*
位置データ最大数
5~40 */
#define jmax 4 /*
近似式最大次数 2~4 */
案2)
メモリ用ICを追加してパソコンから変更して、メモリに記録(QCAMFTみたいに)。
ソフト作りに手間がかかる。 部品が増える。
案3)
H8-3664N内蔵のメモリにパソコンから指定したデータをメモリに記録(QCAMFTみたいに)。
ソフト作りに手間がかかる(未経験)。チップの問題もあり。
| パーツ番号 | 数量 | @ | |||||||
| H8-3664F (or H8-3664N) | 秋月 | K-00159 K-00467 |
1 | cpuボード | 1600 | 1600 | |
ここと同じ | |
| モーター(ジャンク) | 秋月 | 2 | |||||||
| D-SUB9 | 秋月 | 100 | 100 | ||||||
| ロータリーエンコーダ | 秋月 | P-292 | 1 | モーター速度調整 | 200 | 200 | |
||
| ドライブIC (例として) | 秋月 | I-419 | モーター駆動用 | 200 | 400 | データシート 概要 | |||
| バッテリー | ???? | ???? | |||||||
| タクトSW | 9 | 押してON/離してOFF | |||||||
| LED | 5 |
ステップモーターのドライブで使用可能なもの
・フーコーテスターと同じ回路(バイポーラ)
・専用ドライブIC(パルスと回転方向を入れるだけでOK)
・マイクロステップドライブ(三杉さんと同じ)
・2相ユニポーラでダーリントンIC(FET)
| No | 機 能 | 備 考 | ||
| ① | 小型ロータリーエンコーダ | 1 | 手動速度調整 | 速度と変化率調整 |
| ② | タクトSW | 1 | 位置データ登録 | 視野の中心に天体を入れてポン |
| ③ | 1 | データリセット | ⑥をダブルクリックする(ブザー長く鳴る) | |
| ④ | 1 | 加速 | モーター速度の変化率が変わる | |
| ⑤ | なし | データ登録数UP/DOWN | ⑥を押しながら①を回す(ブザー鳴る。ピかピピ) 限界まで行くと長くピー |
|
| ⑥ | 1 | 自動手動切り替え | 自動と手動の切り替え | |
| ⑦ | 1 | Xモーター停止 | ||
| ⑧ | 1 | Yモーター停止 | ||
| ⑨ | トグルSW | X.Yモーターの選択 | 手動モーターの選択 | |
| ブザー | ||||
| 1 | マイコンリセットSW | |||
| ⑪ | LED | 1 | 電源 | |
| ⑫ | 1 | 自動/手動(on/off) | ||
| ⑬ | 1 | 異常表示 | 計算不能で制御不可 | |
| 1 | Xモーター | 動作と停止の表示 | ||
| 1 | Yモーター | 動作と停止の表示 |
ソフトの機能
流用できるソースがあるもの。
・モーター制御
・最小二乗で近似
・ロータリーエンコーダー入力(モータースピード)
・SW処理
・モータースピード制御
{kind=link}