USB対応XYステージ制御用基板 2009.10.30
ここで紹介しているものは、正常に動かす為のファームを公開していません。
公開予定も未定です。製作にないようにお願いします。
注意 (2010.10.5)
ここで使用しているUSBシリアルですが、通信(マイコンからパソコン)で文字が欠落する場合が
あることがわかりました。 パソコンにより、発生したりしなかったりします。
USBシリアルのファームが改善しない限り、直りません。(開発元では改善の意思なし?)
これから作る場合、この基板は止めた方が賢明です。
こちらのタイプをお勧めします。
すでに作成された方で、具合の悪い場合は、パソコンソフト側で対処可能な場合もありますので
連絡下さい。
もしこの問題を承知の上で製作される場合は、ファームの書き換え環境を手元に置いて(AVRライターを所有して)
製作された方が良いでしょう。
データの欠落はこんな感じ 赤の部分
| 送信データ | 受信データ | |
| C 1 0 F X X X Y |
C_OK 1_OK 0_OK F_OK X_OK X_OK X_OK Y_OK |
正常の例 |
| C 1 0 F X X X R |
C_OK 1_OK 0_OK F_OK X_OK _OK _OK _OK |
データ欠落の例 欠落は、先頭の1バイト |
ファームに手を入れて、1文字、1文字転送の間に50msのWAITを入れ
最大転送バイト数を7バイトにしたところ、転送エラーがなくなりました。
そこで、ボーレートを変え、別のパソコンでも試してみました。
パソコンAでは、成績良いですが、パソコンBは、全く駄目ですね。
エラーの内容は、先頭バイトが欠落します。
こんな訳で、これを作るのは、とてもリスクが高いです。
| BPI | パソコンA | パソコンB | |
| 1 | 4800 | ○ | X |
| 2 | 9600 | ○ | X |
| 3 | 19200 | ○ | X |
| 4 | 38400 | X | X |
対策しました。 2010.10.21
ファームにも手を入れたら絶好調になりました。4800~38400 、パソコンA、パソコンBで 安定に動いてます。
まず問題無いと思います。 現在公開準備中です。
安定に動いてはいますが、対処療法による対策で、マザーボードによりトラブルが起きる場合も考えられます。
ファームの公開は、止めることにします。
----------------------------------------------------------------------------------------------------
Windows98, WindowsMe
では、動作しません。(2010.5 追記)
(1) 新しい回路です
2009.10.15 改 2010.6.8
改
・ MAX232等のCOMポートI/Fの部分を変更し、USBに接続するようにしました(Attiny2313使用)
パソコンから見れば、COMポートの機器に見えます。
USBの部分のみ
・ モータードライブの部分は、前と全く同じです。 ファームも同じのが使えます。
Attiny2313を2個使用することになります。
秋月では、Attiny2313は、@100円で購入できます。
・ USB シリアル変換のファームは、ここから入手して下さい。
http://www-ice.yamagata-cit.ac.jp/ken/senshu/sitedev/index.php?AVR%2FHIDaspx_news02#o2ec2e47
usbRS232(ファームウェア,
ソースコード) ※4 : usbRS232-2009-0914.zip
又デバイスドライバーは、ここから入手して下さい。
Windows98、WindowsMe には対応していません。(使用不可)
http://www.recursion.jp/avrcdc/downloadj.html
avrcdc_inf.zip (40 KB,
2009-08-24 更新)
まれに動かないマザーボードがあるらしいでが、USBハブ使用で解決する場合があるらしいです。
動かない場合は、入手元の掲示板で解決できるかもしれません。
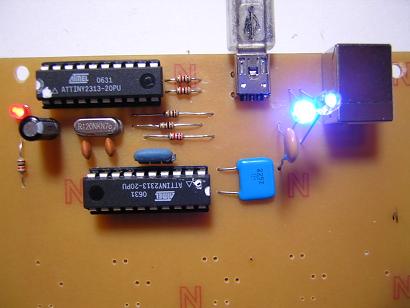
・ 私は、USBシリアルの部分だけ作成し、既存の部分と接続して確認しました。( OS:WinXP)

(青色ledが2個ですが飽和してます。これは改造前の写真。)
ショットキーバリアーダイオードをLEDと直列接続しました。 これでD-端子は、
約2.8Vが3.0Vになり、LEDの明るさも減って具合よくなりました。

部品を追加しました。RS232Cの通信確認用LEDを追加。

XYステージのファームとの通信は、これを使用。 上とドッキングします。
赤LEDは、Xモーター、Yモーターを動かした(つもり)場合に点燈。
回路図どうりのパーツが無かったので、次のようにしましたが、動作しました。
| 回路図 | 実際のパーツ | ||
| R1、R2 | 68Ω | 100Ω | |
| R3 | 1.5KΩ | 2.7KΩ | |
| C2、C3 | 22PF | 20PF | |
| R4、R5 | 120Ω | 100Ω |
USBのマイコンは、ATTINY2313-20PUが良いです(12Mhzで動かすから)。
(ATTINY2313V-10PUは、10Mhzまでなので規格外の働き)
SUBから電源をとっています。5Vで動かした方が都合が良いです。
モーター以外の電源はUSBから供給できるはずです。
12Mhzは、セラロックは不可で、必ずクリスタルです。
ZD(ツェナーダイオード)を使用する場合は、3.6V(3.0V~3.6Vが使える)がよいそうです。(極性注意)
ledを使う場合は、1個の場合は、青色以外不可です。(今回の動作時 2.8Vで少し低すぎ)
赤色led等を2個直列で動作する方法もあるそうです。(3.3V前後にして)

青色LED ツェナーダイオード
USBに接続する(マイコンに電源を供給)と、デバイスドライバーを要求されますので、上記を解凍しておいて、
そのフォルダからインストールさせて下さい。 上記HPに詳しい説明があります。
コントロールパネル -> システム -> ハードウエア ->デバイスマネージャ から 割り当てられたCOMx(COM3とかCOM4とか)
が分かります。
D-に接続しているLEDは、電源を供給した瞬間から光ります(プルアップしてるから)。
D+に接続しているLEDは、電源を供給した後点滅し、その後は(通信してる)光ります。
両方USB通信時にわずかに、瞬きます。
「BUSY LED」 は、通常は、点燈せず、RS232C通信している間のみ点滅します。
ここは明るめにしないと、フラッシュがパッパッパッとなりません。ボーっと光るとかっこ悪いです。
まあこれは無くても、動いてしまえば不要ですが。

ここで手順を追う場合は、USB用シリアル用マイコン外した状態での2ピン,3ピンを接続(短絡)し、ターミナルソフト
からループバックテスト(入力したキーがそのまま帰ってくるかのテスト)ができます。
ドライブ用マイコンと正しく接続し、QCAMFTのモーター設定でCOMxを変更してください。
これでQCAMFTから使用できるようになります。
問題が1つあります。ファームの読出しが正しくできません (Ver3.0A20)。 それ以外は、OKでした。
対処したVer3.0A21 以降を使用してください。
「使用した感想」
安定に動いてます。 不安定な印象は、ありません。
通信QCAMFTの通信テストに常用することにします。 モーター回さないのなら、電源不要で楽です。
(2)
-------------------------------------------------------------------------------------------------------------
USBコネクタ端子
こんなのありました。共立エレショップ
http://eleshop.jp/shop/g/g94F311/ \250

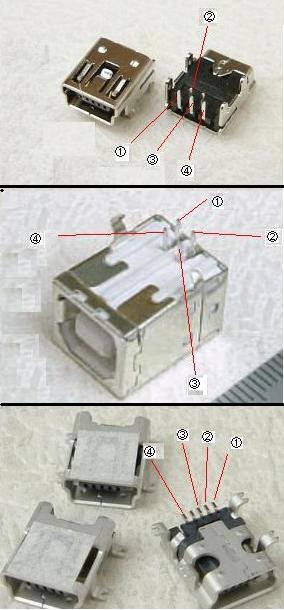 |
USBコネクタの端子 ①5V (パソコンから供給) ミニタイプ(上と下)は、 |
100円ショップでUSBケーブルを購入し、機器側の先端を切って線をバラし、
基板に半田付けする手もあります。
線の色は、このパターンが殆どらしいです。 テスターで確認してください。
赤:5V
白:D-
緑:D+
黒:GND
-------------------------------------------------------------------------------------------------------------
USB部分で秋月で購入できるもの
ATTiny2313 http://akizukidenshi.com/catalog/g/gI-01600/
こっちが良いらしい
http://akizukidenshi.com/catalog/g/gI-01720/ 動くらしいけど規格外の使い方
12Mhz クリスタル発振子 http://akizukidenshi.com/catalog/g/gP-01765/
青色LED http://akizukidenshi.com/catalog/g/gI-01222/
USBコネクタ(Bタイプ、USBミニタイプ 2種類)
http://akizukidenshi.com/catalog/g/gC-00161/ USBコネクタ(Bタイプ、メス)
http://akizukidenshi.com/catalog/g/gC-02107/ ヒロセ表面実装用USBコネクタ・ミニB
http://akizukidenshi.com/catalog/g/gC-02235/ ミニBタイプ
USB部分で共立エレショップで購入できるもの http://eleshop.jp/shop/default.aspx
22PF http://eleshop.jp/shop/g/g4C613I/
3.3Vツェナーダイオード http://eleshop.jp/shop/g/g91S316/
LED青 http://eleshop.jp/shop/goods/search.aspx
USBコネクタ http://eleshop.jp/shop/goods/search.aspx?style=D&search.x=0&tree=11201127
抵抗 http://eleshop.jp/shop/contents3/search_regis.aspx
(2) 製作
基板の作り方は、ここを参考にして下さい。
https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/control/control.htm
トナー熱転写のパターンを配布しています。
ここでは、新しくなった部分のみです。
基板パターンのCADデータ(kban形式)とkbanの再配布は、これ。 2009.10.14
ドリルサイズを変更しました。 これ(Limit Drill Size をチェックしない)
で印刷してして下さい。(600は、プリンターに合わせる)

USBコネクタは、2種類並列につけてます。(どちらかあればOK)
使用時は、どちらかに挿し込みます。 両方挿すと、パソコン壊れるかも。

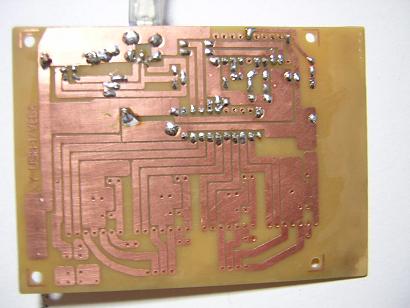
基板の部品側から、透視して見たパターンです。
黄色ノ線は、シルクノ線で、部品を表しています。
緑色線は、トップのパターンでジャンパ線を表しています。 、
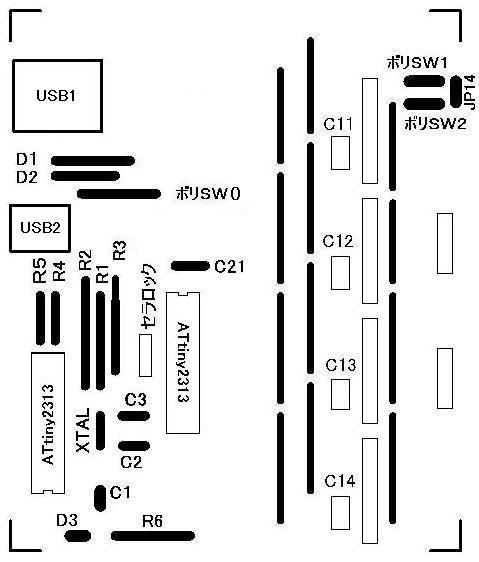
部品配置です。
SUB1は、SUB-Bタイプ (写真真中)コネクタ
SUB2は、SUBミニ (写真上)のコネクタ
ボリSW0は、100mA(マイコン用)
ボリSW1は、100mA(制御回路用)
ボリSW2は、3A(モーター電源用)
JP14は、基板上で電源を共通(同時に供給)にする場合必要です。
右側の縦長黒線は、全てジャンパー線(12本)です。 上記の緑線
電源は、2種類必要です。
A. モーター用 5V、3A
B. 制御系
5V、0.1A以下
| TA7257Pの7ピン | TA7257Pの6ピン | ATTINY2313-1 の20ピン | ATTINY2313-2 の20ピン | ||
| A. モーター用 | ○ | 外部から | |||
| B.モーター制御系 | ○ | 外部又は USBから |
|||
| C. マイコン | ○ | ○ | 外部又は USBから |
制御系の電源をUSB端子から取る場合は、誤配線等でパソコンにダメージを与えるリスクがあります。
基板が正しく動作することを確認し、その後に電源をUSBに切替する方法もあります。
又電源の投入順序は、モーター用を後(又は同時)に入れて、先(又は同時)に切る必要があります。(TA7257P保護)
USBから電源をとる方法は一見便利そうですが、電源投入順序などの煩わしさ(故障リスク)があるので、
マイコン以外の電源を外部から取る方法をお勧めします。 電源は、同時投入。
もしUSBから電源をとる場合は、ボリスイッチ0を使います。
外部電源は、ボリスイッチ1、ボリスイッチ1を介して供給します。 外部電源と、USB電源がぶつかる(同時に
供給する)と、パソコンが壊れる恐れあります。
TA7257Pノ代わりにTA7248Kを使用する場合は、6ピンに配線せず、7ピンにモーター用電源を配線します。ボリSW2
をボリSW1の位置につけます。 この場合は、SUBからの電源は、マイコンのみに供給します。
又ファームは、TA7248K対策したVer1.4を使用します。
電源供給方式
① 方式1
ボリSW0、ボリSW1、ボリSW2、JP4 使用
USB
ATTINY2313(USB用)、ATTINY2313(モーター制御用)
外部電源 5V(3A程度)
TA7257PにJP4を結線して供給する。JP4使用で同時(同じタイミング)供給ができる。
② 方式2 (全て外部から)
ボリSW1、ボリSW2、JP4 使用 (ボリSW0は、使用しない。間違うとパソコン壊れるかも。)
上記のパターンの白丸(2個ある)のうち、いずれか一方をショートさせる。(これで2個のATTINY2313供給される)
JP4に位置から外部電源(5V、3A程度)を供給する。
(3) プリント基板作製

トナーの熱転写方式で、作ってみました。 もっと綺麗に作るつもりでしたが......。
基板は、左右反転します。
こんなように
https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/pcb/pcb.htm
(4) 製作と確認手順
準備としてマイコンファームを書き込んでおきます。
① まずモータードライブIC付近以外の部品を付けます。
マイコンは、ソケットをします。
② USBシリアルのマイコンを実装し、USBに接続します。
デバイスドライバーが要求されるので、インストールし Virtual Cominucation Port (上記)なっているか
確認します。
③ USBシリアルとし動作しているか確認するには、モータードライブ用マイコンを実装せず、
ICピン上で2,3ピンをショート(抵抗の余り線等)します。
ここでターミナルソフトで、エコーバックすることで確認できます。(COMxを合わせる)
③ モータードライブ用マイコンを実装すれば、QCAMFTで通信のテストが出来ます。
COMxを合わせれば、QCAMFTから全ての操作(モータは動きませんが)ができます。
④ 残りの部品を付け、外部からモーター用電源を接続し、モーターを接続してます。
これでモーターが動けば基板は完成。
(5) 基板使ってみました 2010.6.7
動作するか分からない基板パターンを公開するのは、マズイですね。
ということでモータドライブIC以外のパーツを実装してみました。
手持ちの関係で、回路図とは値が結構異なりますが。
 |
1作目の基板を使いました。 ツェナーダイオードが無いので、青色ダイオードを使いました。 青色LEDは、仮付けです。 抵抗は、1/6Wです。 1/4Wでは、R4,R5の穴間隔が少し狭すぎます。 電源は、USBから取ってます。 モータードライブICの、実装予定はありません。 |
 |
パターンが広いので半田は、半球状態にならずあまり綺麗 ではありません。 サーマルランドにすれば、綺麗になると思います。 |
 |
パターンに間違いは、無かったようで動作しました。 QCAMFTから通信させました。 USB端子、どちらでも使用可能でした。 クランプの為の青色LEDの電圧は、2.62Vとなり USBの規格(2.8V~3.6V)より外れてしまいました。 動作してますが、信号電流が流れすぎてパソコンの負荷になるはず。 LEDにシリコンダイオードを直列に入れました。 D-端子の電圧は、3.15Vになり、LEDの明るさも自然になりました。
写真は、改造前のものです。 |
これからは、このタイプのマイコン書込み依頼があった場合、 これを使い動作確認します。 |
|
外部電源を使う
 |
基板上のボリSW0を取り外しました。 これでUSB(パソコン)からの電源供給は、なくなります。 代わりに外部電源5Vに接続しました。 |
 |
電源を供給するとD-側のLED(D1)のみ光ります。 この状態でUSBでパソコンと接続するとD+側のLEDが数回点滅し、その後 この状態で外部電源を切ると、LEDは消えデバイスマネージャーからも 【実際にQCAMFT(測定ソフト)を使う場合】 その後QCAMFTを起動します。逆にすると、「COMxが使えません」 |
(6) 改定しました。
改定回路図 2010.6.22 改
① USB(パソコンj)から電源供給はせず、全て同一の外部電源(5V)から供給します。
上の回路図は、電源の供給が曖昧で、誤解を招く恐れがありました。
ボリSW0は、使用しません。(特に注意して下さい。パソコン壊れます)
こうすれば、ドライブICの同時供給、同時遮断の条件は、満たされるます。
このパターンを使用する場合は、、上側の白丸の部分をショート(通電)します。
(このパターンには、まだC2がありません。)
② C2の0.1uFを追加。
古い基板パターンを使用する場合は、C1の脇に実装してください。
③ D1は、D2は、無調整で使用できる3.6V(3.3V~3.6V)のツェナーダイオードの使用をお勧めします。
TOPへ
{kind=link}
{kind=link}