追尾装置
vega 2004.4.01~
改定 2004.6.26
経緯台(ドブソニアン)のモーターの速度を調整し、しばらく視野の中心に入れておけば後しばらくはノータッチで追尾
するような追尾装置を考えています。
外国には、ドブドライバーというのがあるようです(詳細不明)。
導入を考えなければ、ソフトの規模はずっと小さくてOKで、星図データも要りません。パソコンも不用です。
そんな装置が数千円(モーターを除く)でできるなら愉快です。
マイコンは、H8/3664で十分で秋月で1600円です。
まずどうすれば、精度良く長い時間追尾できるかなど、検討してみたいと思います。
1年以上前、4次式で追尾すれば制度が良いと分かりましたが、これは短時間での話です。
ズレだすとあっと言う間に、ズレが大きくなります。
2次式では、短時間での精度はそこそこですが、ズレ出しても一気にズレが大きくなることはありませんでした。
このあたりも再度検討してみようかと思います。
実は2003.11月に少し、マイコンソフトを作ってみました(ハードは無し)。
大分形になってますが、中断中です。ここ
1. 追尾誤差 (2004.6.26)
経緯儀の星の位置は、観測地点の緯度、星の時角、赤緯が決まれば、方位角、高度が決まります。
時間とともに時角が変化し、それに従い方位角、高度が変化します。
私の教科書にその関係式が書いてあります。(注1)
計算の手順
① 指定した方位角と高度から時角、赤緯を求める。
② 時角を変化させ、方位角と高度を求める。(例えば 1分毎に120分後まで)(真の値)
③ ②の結果の最初の数分の方位角と高度を元に、120分後までの予測(多項式に近似計算)をする。
計算は、高度と方位角を別々に計算する。
④ ②と③の結果を比較する。
(1) まずは、最初に誤差無く追尾した場合。(実際には、ありえないですが)
シミュレーション結果です。
横軸は、120分
縦軸は、追尾誤差(角距離(注2))で上下の薄いグレーの線が±0.1degで、黒線が誤差ゼロです。
1分間隔で6回視野の中心に入れ(導入誤差ゼロとする)データを登録したとします。
例えば1次式(直線)ではデータが2ヶあれば直線が引けますが、データが多い場合は最小二乗方で式を決めます。
一次式(直線)、2次式、から5次式までの5本の青線が結果です。
多項式の次数を上げに従い精度が良くなります。
最初の追尾誤差が無ければ、4次式で1時間追尾しても追尾誤差はほとんどありません。
最初の追尾誤差をいかに少なくさせるか(スムースに視野の真中に入れるか)がポイントの
ような気がします。
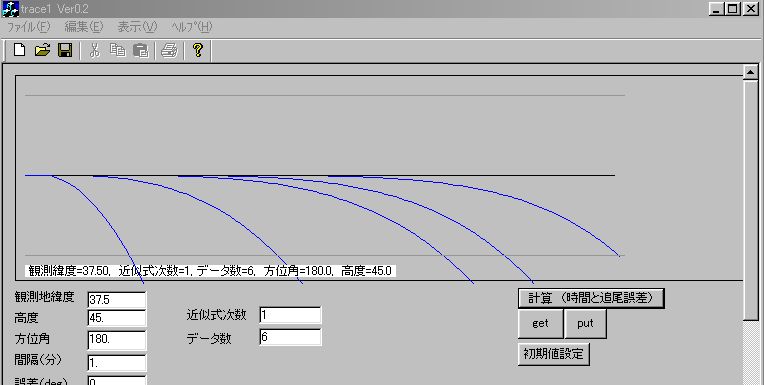
方位角は、北がゼロで東回りに計ります。東が90度、南が180度。
方位角や高度を変えると誤差の大きさも変わります。
遊びたい人はどうぞ。かなり手抜きなので、そのつもりで。
間隔(分)は、1で、誤差は、0で使用して下さい。putボタンでパラメータが保存されます。
trace1.lzh Ver 0.2a 2004.7.16
バグ修正(と機能追加中)
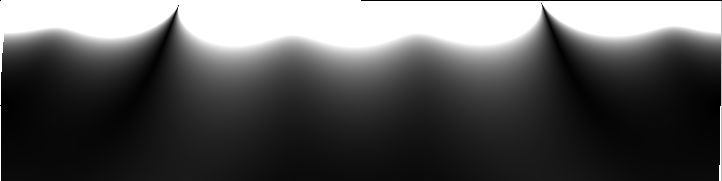
(2) 追尾場所による追尾誤差
追尾場所で誤差がどう変わるか、マップにしてみました。
横軸は、方位角が0度(北)から東回りで360度
縦軸は、高度が0から90度まで。
輝度が明るい(白い)場所が誤差が多い所で、観測地の緯度や式の次数
を変えると形が変わり興味深いです。真っ黒と真っ白では、誤差が少なくとも255倍
の違いがあります。
マップ濃度を1.0とした場合は、追尾誤差を10000x1.0
倍します。
例えば、0.003の場合は、10000倍されて輝度が30になります。又255以上は255になります。
マップ濃度を調整すれば、任意の濃度に変更可能です。

例1) 緯度37deg、2次式、データ6個 10分後の追尾誤差
(3)最初のデータ登録による誤差の影響(最初の追尾誤差)
最初に人間が操作して視野の真中に入れる場合に誤差が発生するのは避けられません。
誤差を含んだデータを元に追尾した場合どうなるのか、実際に(計算シミュレーション)してみました。
現状の結論
(1)データ登録の間隔(時間)が大きい方が、以後の追尾誤差が少ない。(あたりまえか!)
(2)近似式の次数が大きい方が、(高次の項が影響して)ズレ出すとあっと言う間に視野から
消える。次数を場合により変更するのが良いかも。
(3)最小二乗法に期待して、データを沢山登録しても正確に視野の真中に入れなければ、
追尾誤差は改善されない。データのが少なくても良いから正確に入れるのが重要。
これは少し意外でした。数を多くすれば改善されるかと思いましたが、10個以内なら改善無しです。
それ以上多い場合はわかりません。