USB対応XYステージ制御用基板(その2) 2010.5.30
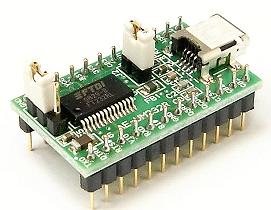
秋月のFT232RL USBシリアル変換モジュール
を使用しました。
コストは、少し高めですが、パーツ数が減り製作しやすと思います。
Win98、WinMe, WinXP、Win2000 で使用できます。 (WinMe、Win2000は未確認)
COMポートないパソコンになり、困っている場合も改造がやりやすいと思います。
又このモジュールをAVRのライターとして使用することができます。(ファームを書きこみ可能)
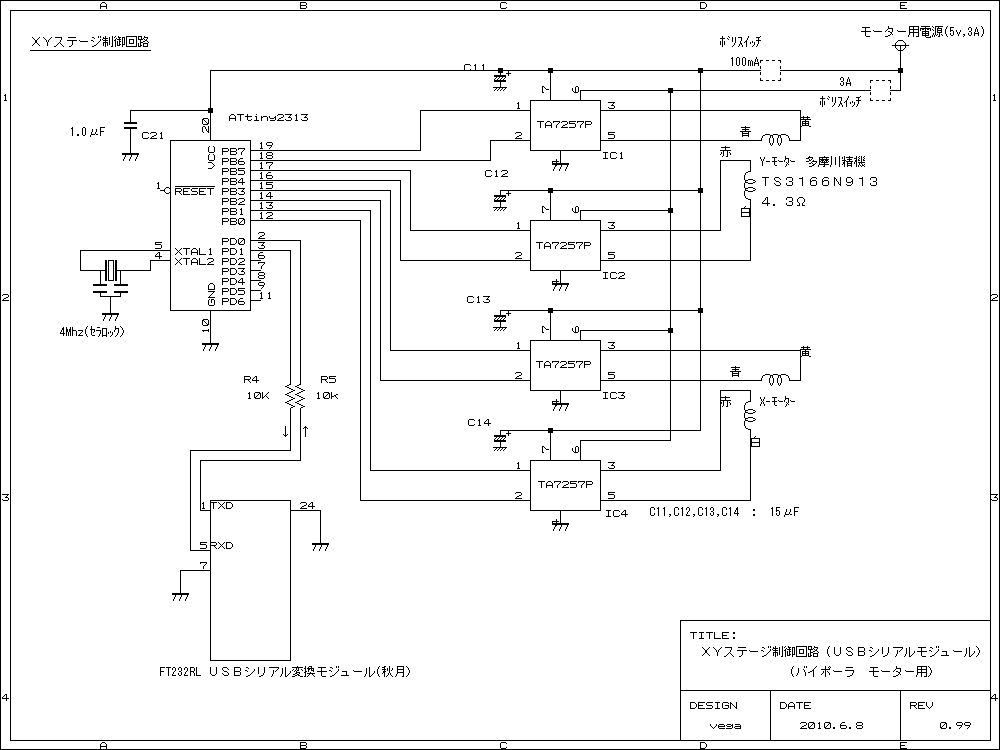
(1) 回路図です 2010.5.31
2010.6.8 改
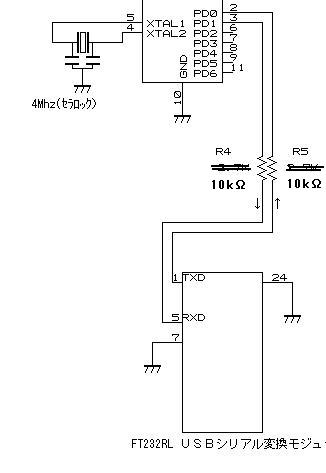
USBシリアルの部分です。
このモジュールを使用します。完成品です。部品は全て実装されています。
http://akizukidenshi.com/catalog/g/gK-01977/
モジュールの電源は、USB端子から供給します。又このモジュールから外部に電源を
出すことは行いません。
これで電源ショートによるパソコン故障のリスクが低減されます。
外部に出すのは、信号線2本(1ピン、5ピン)とグランド(7ピン、24ピン)のみです。
R5,R6は、保護用抵抗です。 10KΩでもおそらく問題ないと思います。
2.7KΩ から 10kΩ に変更しました。 (2010.6.8)
USBシリアル変換モジュールにジャンパーが2箇所あります。
J1 : 2-3をショートする。(VIOは、VCCを使い、信号を5Vで出す)
J2: : ショートする。 (電源はUSBから供給(5V))
・ モータードライブの部分は、前と全く同じです。 ファームも同じのが使えます。
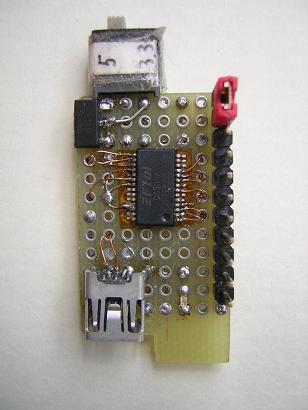
・ 私は、自作したFT232RLで既存の部分と接続して確認しました。( Win98、WinXP で確認)
 |
 |
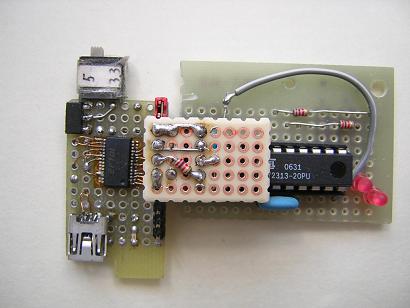 |
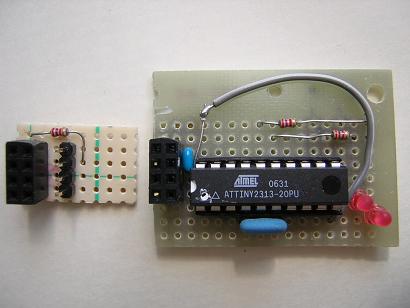
合体してテスト。 XYステージのファームとの通信は、こうやって使用。 赤LEDは、Xモーター、Yモーターを動かした(つもり)場合に点燈。 |
「使用した感想」
WIN98,WINXPともに安定に動いてます。 不安定な印象は、ありません。
-------------------------------------------------------------------------------------------------------------
秋月で購入できるもの
ATTiny2313 http://akizukidenshi.com/catalog/g/gI-01600/
抵抗 http://eleshop.jp/shop/contents3/search_regis.aspx
24ピン丸ピンソケット http://akizukidenshi.com/catalog/g/gP-00032/ (USBシリアル変換モジュールの実装で使用)
(2) 製作
この基板パターンは、実績があります。 (2010.6.15 掲示板投稿)
又トナー熱転写用のパターン配布しています。
基板パターンのCADデータ(kban形式)とkbanの再配布は、これ。 2010.6.2
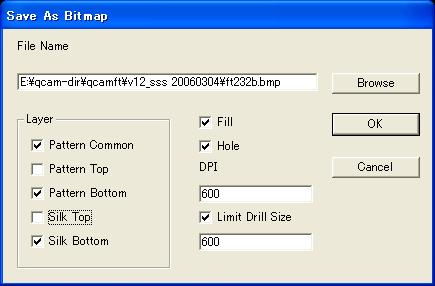
CADデータからパターン用BMPデータを作る場合、このように。
基板の部品側から、透視して見たパターンです。
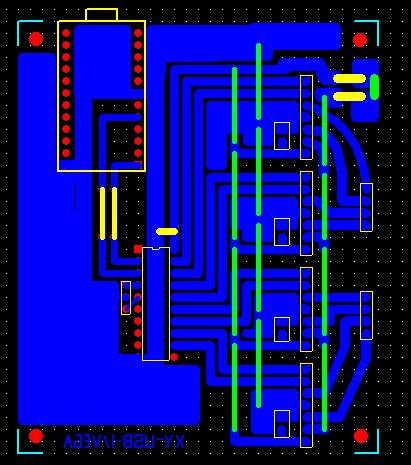
黄色の線は、シルクの線で、部品を表しています。
緑色線は、トップのパターンでジャンパ線を表しています。 、
部品配置です。赤く塗った部分がUSB端子のつもりです。
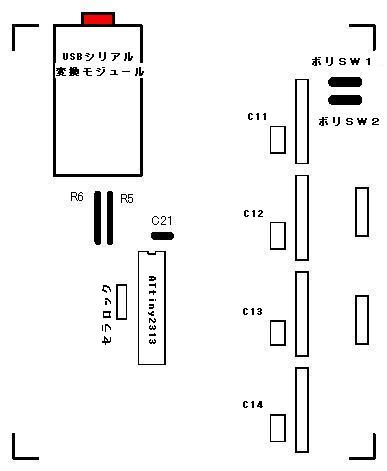
ボリSW1は、100mA(制御回路用)
ボリSW2は、3A(モーター電源用)
右側の縦長黒線は、全てジャンパー線です。 上記の緑線
TA7257Pノ代わりにTA7248Kを使用する場合は、6ピンに配線せず、7ピンにモーター用電源を配線します。ボリSW2
をボリSW1の位置につけます。 又ファームは、TA7248K対策したVer1.4を使用します。
電源供給方式
JP14に位置から外部電源(5V、3A程度)を供給します。
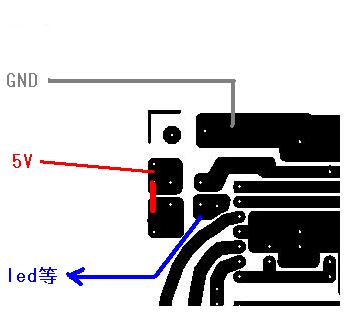 |
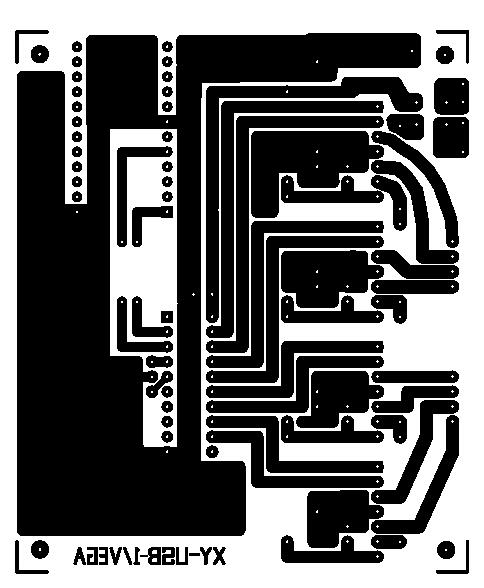
実際のパターンをパターン側から見た図です。 上記の右上の部分を左右反転した形になっています。 外部電源は、ボリスイッチ1、ボリスイッチ2を 介して供給します。 外部電源の5VとGNDは、左の図の位置に配線します。 |
(3) 基板製作
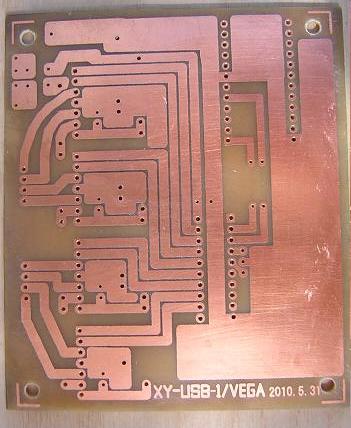
トナー熱転写で基板を作る場合は、こんなようにして作ります。
https://ss1.xrea.com/vega.s58.xrea.com/telescope/qcamft/pcb/pcb.htm
(4) USBシリアル変換モジュール の動作確認
単独に動作を確認します。必要なものは、USBシリアル変換モジュールとUSBケーブルのみです。
① モジュール内のジャンパー線
J1: 2-3にショートピンを刺す
j2: ショートピンを刺す
② デバイスドライバーを準備します。 Windows98とWindowsXPは、異なるので注意。
又FT232RLのデバイスドライバーは、ここから入手して下さい。
http://www.ftdichip.com/Drivers/VCP.htm
Win98(WinMe)用は、これです。 http://www.ftdichip.com/Drivers/VCP/Win98/R10906.zip
このドライバーは、もうメンテナンスしないそうで、これが最終版です。
XP用等は、これです。 http://www.ftdichip.com/Drivers/CDM/CDM20602.zip
XP用は、時々更新されています。
③ パソコンとケーブルを接続すると、即認識されます。
認識されない場合は、ジャンパーのJ2をチェック(ショートされているか)します。
④ デバイスドライバーをインストールする。
インストール方法(XP)
http://homepage3.nifty.com/junamano/pb-1000/technote/usbser/drvinst.htm
Win)98も似たような感じでインストールできると思います。
上記サイトには、英語ですがインストールガイドがありました。(pdf)
「正しくインストールされたかの確認」
コントロールパネル -> システム -> ハードウエア ->デバイスマネージャ で下記を表示する。
USBを差し込むと下記が表示され、USBを抜くと消滅することを確認する。
COMx の番号を覚えておいてください。
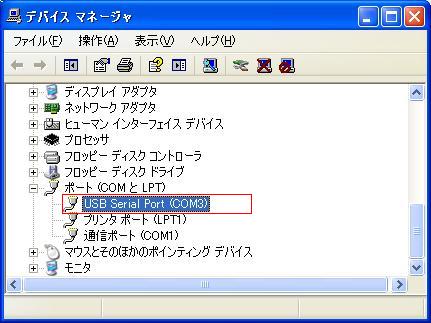
これは、WinXPの場合
(5) 製作と確認手順
① 基板には、24ピン(丸ピンが良い)のICソケットを半田付けし、ブリッジやショートがない事を確認する。
モジュールにはUSBの抜き差しであまり力がかからないので、ICソケットの足を全て半田付けする必要は無いと
思います。使用しない足は、 1個おきか、2個おきで十分です。半田ブリッジには、十分注意して下さい。
ここにUSBシリアル変換モジュールを挿します。 向きに、注意して下さい。
上の基板は、USB端子を上側から差し込みます
モジュールの端子に信号名が書いてあります。
② 製作を段階的に行う場合は、マイコンとセラロックC21のコンデンサを実装し、外部から5Vを供給すれば、
測定ソフトから全ての操作ができます。
ドライブ用マイコンと正しく接続し、QCAMFTのモーター設定でCOMxを変更してください。
③ 残りの部品を付け、モーターを接続してます。
これでモーターが動けば基板は完成。
================================================
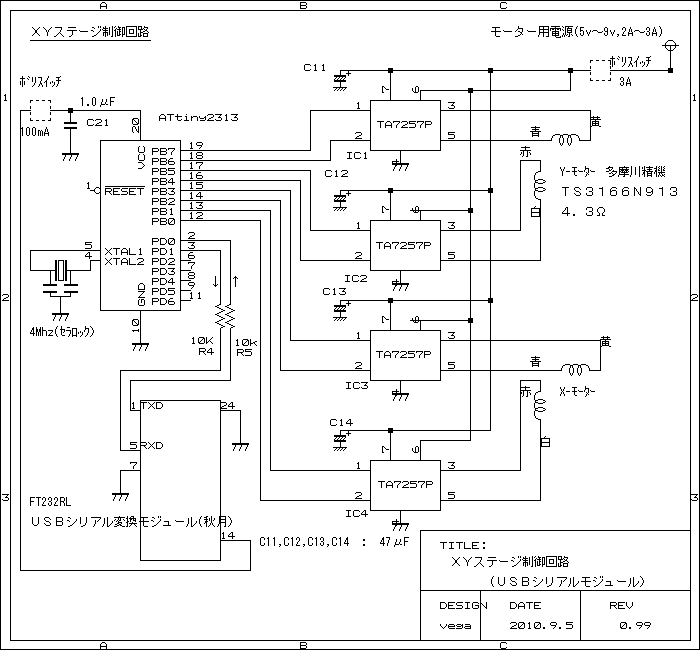
変更しました 回路図です 2010.9.5 改
変更点 : マイコンの電源は、いままで外部から取っていたため5V固定でした。
これをUSBシリアルモジュールから供給するように変更。
これによりモーター側の電圧をこれまでより自由に設定可能になりました。
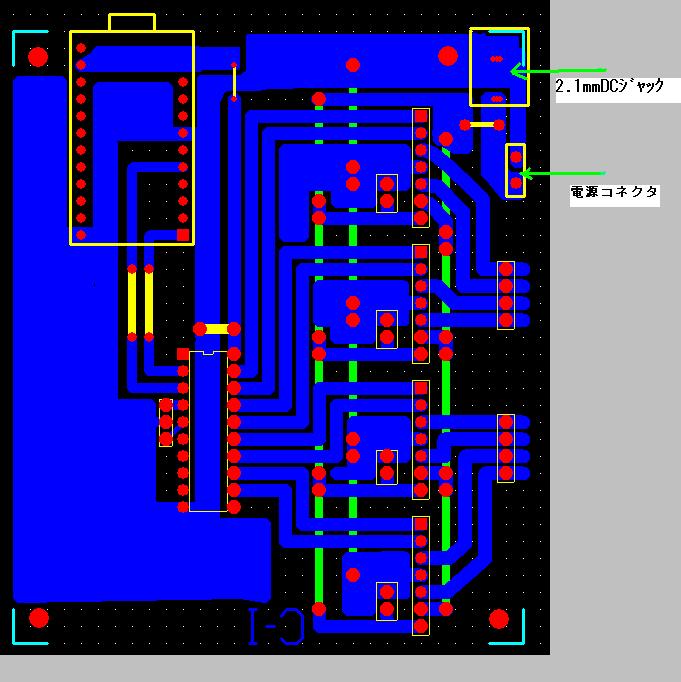
DCジャックのパターンを追加しました。 センタープラス用です。
電源コネクタ(3.9mmピッチ)を実装できます。
基板の角しか空いてなかったので、基板取り付け穴をずらしました。
TOPへ
{kind=link}
{kind=link}